基于SimuIink的永磁同步電機矢量控制系統研究

摘要:根據永磁同步電機(PMSM)在d-q坐標系下的數學模型,在Matlab/Simulink環境下,構建了永磁同步電機磁場定向矢量控制的仿真模型,并對PMSM控制系統進行了仿真研究,同時用仿真結果表明了該仿真模型的有效性以及控制算法的正確性,為永磁同步電機控制系統設計和調試提供了理論基礎。
關鍵詞:Simulink;PMSM;矢量控制;仿真模型
0 引言
永磁同步電機作為一種新型的電機,在結構上去掉了電刷和換向器,運行可靠性較高;而且結構簡單、體積小、運行時轉子無損耗。轉子磁場定向的矢量控制是交流伺服系統中使用較為廣泛的一種控制方式。其基本原理是通過坐標變換,在轉子磁場定向的同步坐標軸系上將電機定子的電樞電流分解為磁場電流和轉矩電流并分別控制,使交流電機具有和傳統直流電機同樣優良的運行性能。本文對基于轉子磁場定向的矢量控制進行了理論分析與研究,運用Matlab/Simulink對其調速運行進行了建模與仿真。
1 永磁同步電機的數學模型
為了實現永磁同步電機數學模型的解耦,通常采用dq0坐標下的數學模型,這樣便于分析永磁同步電機的穩態和動態性能。本文是根據Matlab7.0版本中的永磁同步電機數學模型來進行研究的。

式中,id、iq分別為定子電流的直軸分量和交軸分量,Ld、Lq分別為定子電感的直軸分量和交軸分量,p為極對數,R為定子電阻,ωr為轉子角速度,λ為電機磁鏈。
在dq0坐標系下,永磁同步電機的轉矩方程為:
![]()
式中,第一項稱為永磁同步電機的永磁轉矩,第二項稱為磁阻轉矩。
永磁同步電機運動學方程:
式中,J為電機轉動慣量,F為摩擦系數,θ為轉子的角度,Tm為電機的負載轉矩。
2 矢量控制原理
矢量控制又稱轉子磁場定向控制,磁場定向控制按同步旋轉參考坐標系定向方式可分為轉子磁場定向、氣隙磁場定向和定子磁場定向。轉子磁場定向可以得到自然的解耦控制,在實際系統中得到廣泛應用。永磁同步電動機矢量控制框圖如圖1所示。
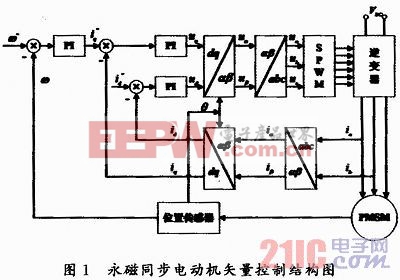
圖1是一個雙閉環調速系統,主要由轉子磁極位置檢測及速度檢測模塊、坐標變換模塊、位置速度電流控制器、SPWM模塊、整流和逆變模塊等組成。
控制過程為:給定速度信號ω*與通過位置傳感器檢測計算得到的速度信號ω比較,經速度控制器調節,輸出![]() 指令信號,作為q軸電流控制器給定信號;d軸電流控制器的給定信號為0。電流采樣得到的三相定子電流ia、ib、ic,通過Clark坐標變換化為αβ坐標系兩相電流iα和iβ,再通過Park坐標變換后得到d-q旋轉坐標系下電流值id、iq,分別作為d軸和q軸電流調節器的反饋輸入,通過比較元件得到兩者的偏差,分別輸入到d軸和q軸的電流控制器,經調節后輸出電壓ud、uq,再經過Park坐標逆變換和Clark坐標系逆變換得到ua、ub、uc,經SPWM模塊輸出六路PWM,驅動IGBT產生頻率和幅值可變的三相正弦電壓輸入永磁同步電機。
指令信號,作為q軸電流控制器給定信號;d軸電流控制器的給定信號為0。電流采樣得到的三相定子電流ia、ib、ic,通過Clark坐標變換化為αβ坐標系兩相電流iα和iβ,再通過Park坐標變換后得到d-q旋轉坐標系下電流值id、iq,分別作為d軸和q軸電流調節器的反饋輸入,通過比較元件得到兩者的偏差,分別輸入到d軸和q軸的電流控制器,經調節后輸出電壓ud、uq,再經過Park坐標逆變換和Clark坐標系逆變換得到ua、ub、uc,經SPWM模塊輸出六路PWM,驅動IGBT產生頻率和幅值可變的三相正弦電壓輸入永磁同步電機。












評論