傳感器與智能車的路徑識別方式

具體應用
我們采取了基于圖像傳感器的路徑識別方案,其參賽的智能車的整體實物照片如圖1所示。邀請賽指定唯一微處理器為Freescale HCS12DG128B16位MCU,128K字節的Flash EEPROM,8K字節的RAM,2K字節的EEPROM,2個異步串行通信接口(SCI),2個串行外圍接口(SPI),1個8通道的輸入捕捉/輸出比較(IC/OC)增強型捕捉定時器,2個8通道、10位轉換精度的模數轉換器(ADC),1個8通道的脈沖調制器(PWM),豐富的I/O資源,內部集成PLL鎖相環,可以提高系統時鐘工作頻率。然而,S12單片機的上限內部總線頻率25MHz。在此限制條件下,將微處理器的總線時鐘設定為24MHz。
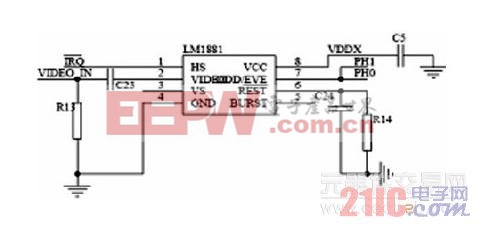
圖2 LM1881視頻同步分離電路
根據智能車賽道引導線與其背景的巨大反差的特點,這里只需要選擇具有全電視信號輸出的黑白圖像傳感器即可。由于所選的黑白圖像傳感器為PAL制,故行頻為64ms,場頻20ms,行同步為12ms(行消隱脈沖4.7mS),場同步脈沖寬度為25個行周期(2.048 ms),去掉行同步時間,則每行的有效信息時間是52ms。通過將圖像傳感器輸出的視頻信號接至視頻同步分離芯片LM1881的視頻輸入端,就可以得到行同步、場同步、奇/偶場同步信號等,這里只使用行同步、奇/偶場同步信號作為單片機進行視頻AD采集的控制信號。使用LM1881提取視頻信號中的行、場同步信號的電路原理如圖2所示。
處理器MC9S12DG128進行AD采樣與轉換的時間要求,這里使用24MHz的總線速度,這樣每采集一個點的時間大約是2ms,每行的掃描時間是64ms,去掉行消隱與行同步時間12ms,每行有效信息時間為52ms。從數據可靠性與穩定性的角度考慮,我們選擇每行采集24個點,每場采集200行,但在實際應用中,每場采取每間隔10行采集一行數據的策略,如此操作就能夠滿足控制系統的精度要求。圖像傳感器每場的數據變換成一個20行、24列的一個二維數組。由于微處理器HCS12DG128B的AD默認參考電壓為5V左右,而視頻信號的白電平為1.2V左右、黑電平0.5V左右,為了體現白黑的巨大差異,這里將A/D采集的參考電壓調整為1.5V,從而使得AD采集的正常結果通常是在85~204之間。
結語
本文從傳感器與路徑識別的關系出發,討論了紅外傳感器與CCD/CMOS圖像傳感器識別方案的優缺點,并優選出CCD/CMOS圖像傳感器用于智能車路徑識別與傳感。通過將基于面陣CCD/CMOS圖像傳感器的路徑識別方案應用于第一屆“飛思卡爾”杯全國大學生智能車競賽,并從眾多使用紅外傳感器的參賽隊伍中脫穎而出,證明了該方案較紅外傳感器在路徑識別中更具潛在優勢。












評論