基于LabVIEW的步進電機控制

3 步進電機控制程序設計
3.1 下位機程序設計
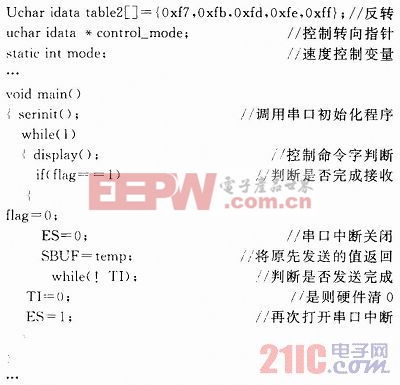
單片機接口程序采用C51語言編寫。程序中,定義了數組table1和table2,用來存儲脈沖信號對應的數據;并定義了一個控制轉向的指針control mode,為該指針賦予不同的值,電機便實現正反轉功能。另外,程序中還定義一個速度控制變量mode,通過PC機發送命令字改變速度控制變量的值便可以實現轉速的控制。在main函數部分,先調用“串口初始化程序”,再調用“控制命令字判斷程序”以實現電機的速度和轉向控制。main函數的最后部分將單片機收到的命令字返回給PC機,方便觀察者查看通信的情況。下面給出main函數及控制變量的程序段。
3.2 上位機程序設計
單片機PC的通信是通過單片機的串口和PC串口之間的硬件連接實現的。由于LabVIEW軟件簡潔直觀,功能強大靈活,該設計采用LabVIEW編寫上位機的控制程序。程序編寫涉及VISA,它的實質是一個標準的I/O函數庫。這些庫函數用于編寫儀器的驅動程序,完成計算機與儀器間的命令和數據傳輸,以實現對儀器的程控。
在LabVIEW里使用VISA,必須安裝NI-VISA程序包,安裝后,與串口通信相關的VISA函數位于Functions→ALL Functions→Instrurnent I/O→Serial子模板上,其中,VISA配置串口函數用于設定一些參數,并將指定的串口按特定設置初始化;VISA寫入函數將“寫入緩沖區”的數據寫入指定的串口;VISA讀取函數從指定的串口中讀取指定字節的數據,并將數據返回至“讀取緩沖區”;VISA關閉函數關閉指定串口的會話句柄或事件對象。本文引用地址:http://www.104case.com/article/160473.htm
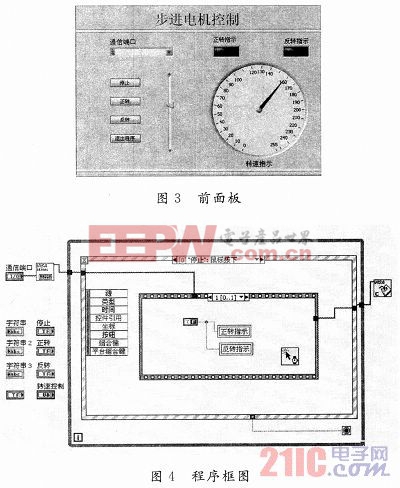
本文設計的步進電機控制程序采用上述的通信函數結合事件結構進行編寫,并通過程序調試,實現了步進電機的轉向和轉速控制。程序前面板與程序框圖分別如圖3和圖4所示。
4 結語
本文利用圖形化編程語言LabVIEW編寫程序實現了PC與單片機的串口通信,并結合單片機外圍電路對步進電機進行了轉速和轉向的控制。實驗證明采用LabvIEW編寫的程序對步進電機進行控制具有人機交互界面友好、編程簡單、效率高等特點,并且采用LabVIEW編寫的控制程序移植性較強,可以很方便地被其他程序凋用以構成功能更齊全的程序。












評論