模糊矢量控制的多電機同步控制系統的設計方案

系統中使用了一臺西門子S7-200PLC作為控制系統的核心,它負責讀取電機速度值v1和電機速度值v2,并計算v1和v2的差值e和差值變化率ec,查詢在S7-200PLC內部建立的模糊控制規則,得到一個控制量,通過現場總線將控制量傳送給變頻器,通過變頻器實現對交流電機的速度控制,最終實現交流電機速度的同步控制。
系統的模糊控制器選用計算機離線計算,在線查表的方法實現參數自調整模糊控制。把復雜的模糊推理過程交給計算機離線完成,得到模糊控制器的總控制規則表和參數自調整規則表。以數據模塊的形式分別存入S7-200PLC系統的內存中,由查詢表子程序管理。
首先建立速度誤差E、速度誤差變化率EC和輸出U的賦值表。
E={NL,NB,NM,NS,0,PS,PM,PB,PL};
EC={NL,NB,NM,NS,0,PS,PM,PB,PL};
U={NL,NB,NM,NS,0,PS,PM,PB,PL};
依據實際工作情況和操作經驗,選取各輸入量與輸出量的論域:
E的模糊論域取[-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6];
EC的模糊論域取[-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6];
U的模糊論域取[-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6]。
隸屬度函數的形狀有很多種,由于人們對事物的判斷往往沿用正態分布的思維特點,所以采用正態分布的隸屬函數,即把三個模糊變量速度誤差E、速度誤差變化率EC和輸出U看成是正態分布的,那么它們三個模糊子集的賦值表可用正態分布的隸屬函數![]()
得到。通過計算可以得到速度誤差E、速度誤差變化率EC和輸出U的賦值表。
4.3 系統軟件構成
1、主程序的設計
本系統的主程序框圖如圖3所示。圖中按照控制工藝要求給電機傳送給定。當中斷時間到達時,即進行參數自調整的模糊控制。參數自調整的模糊控制的框圖如圖4所示。

圖3 主程序框圖
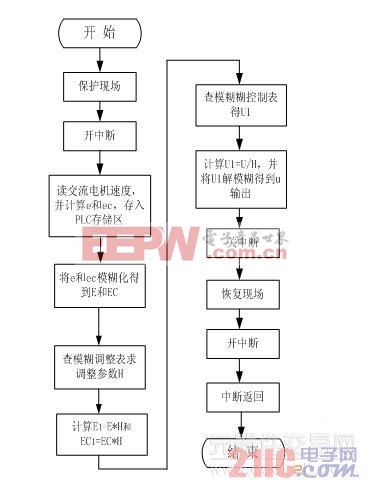
圖4 參數自調整的模糊控制框圖










評論