基于紅外反射式光電傳感器的智能循跡小車

3 步進電機的驅動電路
3.1 步進電機驅動電路
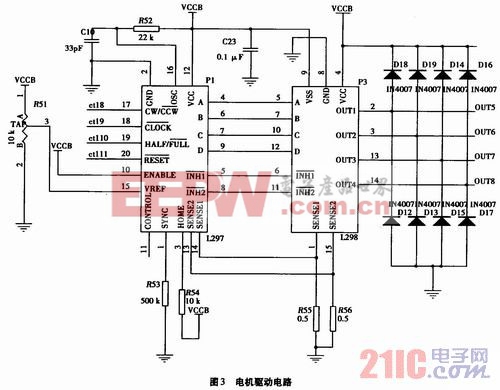
步進電機具有轉矩大、慣性小、響應頻率高等優點,因此具有瞬間起動與急速停止的優越特性。與其他驅動元件相比,有明顯優點:通常不需要反饋就能對位移或速度進行精確控制;輸出的轉角或位移精度高,誤差不會積累,價格便宜。并且因為步進電機是根據脈沖個數決定旋轉角度的,單片機只需記下脈沖個數就能計算出電機的旋轉角度,從而計算出小車的行駛距離,省去了路程檢測模塊,簡化了設計。本系統采用步進角為1.8°、兩相步進電機制作小車,利用89C52單片機作為控制核心,動作相當精準,循跡時紅外傳感器與黑線只留相當小的裕度,小車可以基本沿弧線行走,不再是折線。用兩個步進電機直接驅動兩個前輪,作為主動輪;用一個萬向輪作后輪,作為從動輪。將它們固定到一塊大小合適的實驗板上,車架就組裝完畢,非常簡單。分別對兩個步進電機驅動,靠兩個電機的速度差轉向。系統的硬件設計利用89CS2單片機定時器1口輸出脈沖信號,為L297提供時鐘信號,P1.0、P1.1、P1.2分別作為電機正反轉、半步整步和剎停的控制信號連接到L297的17、19和20管腳;L297和L298作為驅動部分,輸出格雷碼來驅動步進電機工作。如圖3。本文引用地址:http://www.104case.com/article/160340.htm
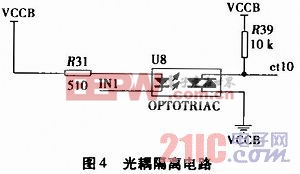
在實際應用中,常用光耦把L297的輸入與單片機的輸出隔開,以免影響控制部分電源的品質。如圖4。
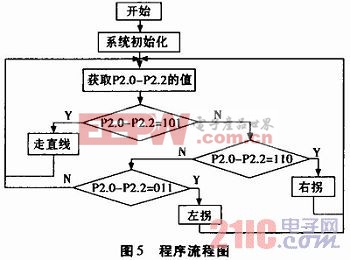
3.2 智能循跡小車的軟件流程
系統實現的軟件流程圖如圖5。
4 結論
本文介紹了智能循跡小車系統的硬件和軟件設計。通過多種傳感器電路,進行比較、分析,最后采用較為精確的位置檢測,為智能小車提供了可靠的方向控制策略,使整個系統的穩定性達到了較高的水平,整個模塊可供自動尋跡小車直接使用。本文在黑色引導線的白板上制成的車道,對智能車進行了測試,數據表明:智能車在直道上可以達到很高的速度和穩定性,在彎道上只要控制好車速,智能車也能平穩地運行。












評論