基于Verilog HDL語言的CAN總線控制器設(shè)計(jì)及驗(yàn)證

摘要:在此利用Verilog HDL設(shè)計(jì)了一款CAN總線控制器,首先根據(jù)協(xié)議把整個(gè)CAN總線控制器劃分為接口邏輯管理、寄存器邏輯和CAN核心模塊3個(gè)模塊,然后用Verilog HDL硬件描述語言設(shè)計(jì)了各個(gè)功能模塊,并使用Modelsim軟件對各個(gè)模塊的功能進(jìn)行了仿真,最后使用FPGA芯片對設(shè)計(jì)的CAN總線控制器驗(yàn)證,并連接了一個(gè)包含該FPGA CAN總線控制器的4節(jié)點(diǎn)CAN總線網(wǎng)絡(luò)。測試結(jié)果表明所設(shè)計(jì)的CAN總線控制器能夠完成設(shè)定的功能。
本文引用地址:http://www.104case.com/article/160238.htm關(guān)鍵詞:CAN總線;控制器;FPGA;Verilog HDL
0 引言
CAN(Controller Area Network)是由ISO定義的一種串行通信總線,它是一種能有效地支持高安全等級的分布實(shí)時(shí)控制的新一代網(wǎng)絡(luò)通信協(xié)議,屬于現(xiàn)場總線范疇。CAN最早被設(shè)計(jì)作為汽車環(huán)境中微控制器的通訊,在車載各電子控制裝置與ECU之間交換信息,形成汽車電子控制網(wǎng)絡(luò),目前應(yīng)用領(lǐng)域已經(jīng)相當(dāng)廣泛。
近年來,支持CAN協(xié)議的芯片不斷推出,給CAN總線用戶帶來了極大的方便。隨著我國對現(xiàn)場總線技術(shù)需求的增加,CAN總線已經(jīng)會成為我國最常用的現(xiàn)場總線之一。
基于CAN總線的ECU電子控制單元的開發(fā),也是現(xiàn)在最熱門的研究。現(xiàn)在對CAN總線芯片的研究已經(jīng)不再局限于單一芯片的研究,而是把所有的功能芯片都集中在一塊芯片上實(shí)現(xiàn)一個(gè)完整的ECU的功能。
本項(xiàng)目目的是利用FPGA實(shí)現(xiàn)一款支持CAN2.0協(xié)議的總線控制器,完成一個(gè)通用的能夠滿足CAN2.0協(xié)議的CAN總線控制器軟IP核,這樣可以在以后的應(yīng)用中方便的集成到其他系統(tǒng)中去。本文使用VerilogHDL語言,設(shè)計(jì)了一款支持CAN2.0協(xié)議的CAN總線控制器,并利用FPGA芯片在CAN總線網(wǎng)絡(luò)中對其進(jìn)行了測試,實(shí)現(xiàn)了設(shè)計(jì)目的。創(chuàng)新點(diǎn)為CAN_Registers設(shè)計(jì)中寄存器模塊、位流處理器的收發(fā)部分功能、測試程序、基于該FPGA的CAN總線控制器的節(jié)點(diǎn)電路等。
1 CAN總線控制器設(shè)計(jì)
1.1 CAN控制器設(shè)計(jì)流程
1.1.1 功能設(shè)計(jì)
首先對CAN2.0協(xié)議進(jìn)行了深入的分析,掌握了CAN總線協(xié)議的各部分內(nèi)容;而后參照和分析了幾種典型的CAN總線控制器的功能;最后選擇PHILPS公司生產(chǎn)的CAN總線控制器SJA1000進(jìn)行進(jìn)一步的分析,掌握了它的各部分模塊的功能。在這些基礎(chǔ)上根據(jù)需要規(guī)劃了所設(shè)計(jì)的CAN總線控制器的功能。
1.1.2 設(shè)計(jì)描述和功能驗(yàn)證
功能設(shè)計(jì)完成后,依據(jù)功能并參照CAN總線2.0協(xié)議,將控制器劃分為若干功能模塊,明確了各個(gè)功能模塊的作用。確定模塊及其功能之后,用Verilog HDL語言實(shí)現(xiàn)了各模塊的設(shè)計(jì)。接著,利用Modelsim對整個(gè)設(shè)計(jì)進(jìn)行了功能驗(yàn)證。
1.1.3 邏輯綜合
功能仿真通過以后,利用QuartusⅡ?qū)λO(shè)計(jì)的CAN總線控制器進(jìn)行邏輯綜合,并把其配置到FPGA中。
1.1.4 硬件驗(yàn)證
配置到FPGA中以后,用所設(shè)計(jì)的基于FPGA的CAN總線控制器作為一個(gè)節(jié)點(diǎn),與采用SJA1000作為控制器的節(jié)點(diǎn)電路進(jìn)行了通信測試,驗(yàn)證了所設(shè)計(jì)的CAN總線控制器的功能。
1.2 CAN總線控制器的整體設(shè)計(jì)
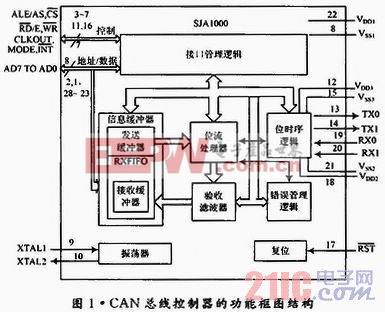
1.2.1 控制器SJA1000的功能結(jié)構(gòu)
SJA1000是PHILIPS公司于1997年推出的一種獨(dú)立CAN總線控制器,用于汽車和一般環(huán)境中的控制器局域網(wǎng)絡(luò)。SJA1000主要由以下幾個(gè)部分構(gòu)成:接口管理邏輯、發(fā)送緩沖器、接收緩沖器、接收濾波器、位數(shù)據(jù)流處理器、位時(shí)序邏輯、錯(cuò)誤管理邏。SJA1000是雙列直插式集成電路,功能框圖如圖1所示。
1.2.2 本文中控制器的功能結(jié)構(gòu)
本文設(shè)計(jì)的CAN控制器參照SJA1000控制器的結(jié)構(gòu),功能基本框架包含如圖2所示的3個(gè)功能模塊。
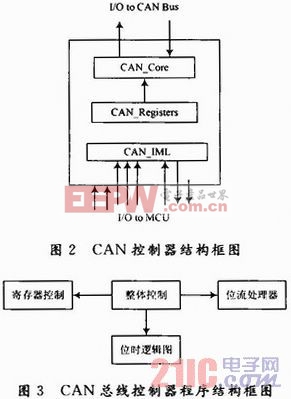
CAN_IML是CAN總線控制器接口邏輯,主要功能是解釋來自微處理器的命令,控制CAN寄存器的尋址,向微處理器提供中斷信息和狀態(tài)信息。
CAN_Core為CAN協(xié)議控制器的核心部分,完成CAN協(xié)議中的數(shù)據(jù)鏈路層的全部功能以及物理層的部分功能,包括LLC子層的接收濾波、超載通知和恢復(fù)管理、MAC子層的數(shù)據(jù)封裝/拆裝、幀編碼、媒體訪問管理、錯(cuò)誤檢測、錯(cuò)誤標(biāo)定、應(yīng)答和串行化/解串行化、以及物理層的位編碼/解碼、位定時(shí)和同步。CAN_Registers為一寄存器組,外部微處理器可以通過地址直接訪問這些寄存器。根據(jù)功能框圖,設(shè)計(jì)了CAN總線控制器的程序結(jié)構(gòu),如圖3所示。
1.3 CAN總線各個(gè)功能模塊的設(shè)計(jì)
1.3.1 CAN_IML設(shè)計(jì)
參照SJA1000,設(shè)計(jì)FPGA CAN總線控制器的接口,如圖4所示。

圖中Port_0_io_7到Port_0_io_0為地址/數(shù)據(jù)復(fù)合總線。Cs_can_i為片選輸入信號。當(dāng)Cs_can_i為0時(shí)允許訪問CAN總線控制器。Ale_i為1時(shí),允許對寄存器進(jìn)行賦值。Rd_i和Wr_i為微處理器的讀使能信號和寫使能信號。Irq_on為中斷輸出信號,用于中斷微處理器。Rst_i為復(fù)位輸入,用于復(fù)位CAN接口。Clkout_o為FPGA CAN控制器提供給微處理器的時(shí)鐘輸出信號,時(shí)鐘分頻寄存器可禁止該引腳輸出。Bus_off_on控制總線關(guān)閉和總線開放接口,Tx_o和Rx_i與收發(fā)器相連,向總線發(fā)送和接收數(shù)據(jù)。
1.3.2 CAN_Registers設(shè)計(jì)
設(shè)計(jì)的CAN總線控制器的寄存器模塊包括以下寄存器:模式寄存器、命令寄存器、狀態(tài)寄存器、中斷寄存器、中斷使能寄存器、總線定時(shí)寄存器0~1、仲裁丟失捕獲寄存器、錯(cuò)誤代碼捕獲寄存器、錯(cuò)誤報(bào)警限制寄存器、接收錯(cuò)誤計(jì)數(shù)器、發(fā)送錯(cuò)誤計(jì)數(shù)器、驗(yàn)收代碼寄存器0~3、驗(yàn)收屏蔽寄存器0~3、接收信息計(jì)數(shù)器和接收/發(fā)送緩沖器。
1.3.3 CAN_Core設(shè)計(jì)
CAN_Core為整個(gè)CAN控制器的核心,負(fù)責(zé)處理CAN的協(xié)議。核心模塊由4個(gè)部分組成,結(jié)構(gòu)如圖5所示。
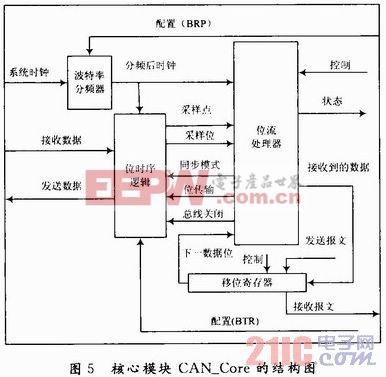
下面簡單介紹CAN_Core模塊中的位流處理器、位時(shí)序邏輯。
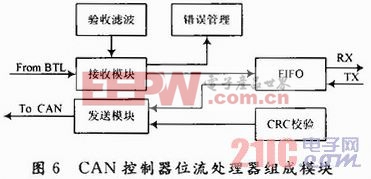
位流處理器是CAN總線控制器中控制數(shù)據(jù)流的發(fā)生器。它還執(zhí)行總線上的錯(cuò)誤檢測、仲裁、填充和錯(cuò)誤處理等功能。主要有接收模塊、發(fā)送模塊、錯(cuò)誤管理模塊、CRC校驗(yàn)、驗(yàn)收濾波、FIFO等6個(gè)模塊組成,如圖6所示。其中CRC校驗(yàn)、FIFO、驗(yàn)收濾波在所執(zhí)行的項(xiàng)目中已經(jīng)有他人設(shè)計(jì)完成。
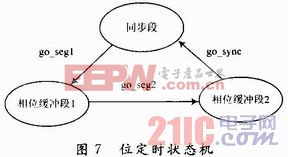
位時(shí)序邏輯的設(shè)計(jì)包括位定時(shí)設(shè)計(jì)、采樣點(diǎn)設(shè)計(jì)、位同步設(shè)計(jì)3部分。下面以定位時(shí)為例介紹其設(shè)計(jì)。
位定時(shí)設(shè)計(jì) 在位定時(shí)設(shè)計(jì)中采用了一個(gè)有3個(gè)狀態(tài)的狀態(tài)機(jī)。3個(gè)狀態(tài)分別對應(yīng)的是同步段和相位緩沖段1以及相位緩沖段2。傳播段占用的時(shí)間短,在控制上沒有特別的意義,僅作為物理層的傳播延時(shí),所以沒有設(shè)計(jì)進(jìn)狀態(tài)機(jī),位定時(shí)部分的狀態(tài)機(jī)設(shè)計(jì)如圖7所示。
接著使用ModelSim軟件對所設(shè)計(jì)的各個(gè)模塊和整個(gè)CAN總線控制器進(jìn)行了功能仿真,仿真結(jié)果表明達(dá)到了設(shè)計(jì)目標(biāo)。
2 測試驗(yàn)證
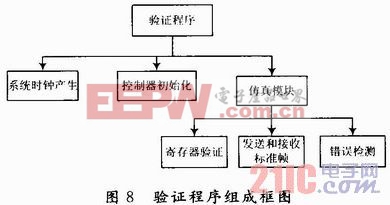
本文最后設(shè)計(jì)了CAN總線控制器的測試程序,其目的是模擬一塊微處理器對CAN總線控制器進(jìn)行讀寫操作,從而實(shí)現(xiàn)對CAN總線控制器的寄存器訪問,完成總線收發(fā)功能。在該測試程序編寫中,各個(gè)功能基本上以任務(wù)的形式實(shí)現(xiàn),進(jìn)行不同的仿真時(shí)只需調(diào)用相關(guān)的任務(wù)模塊。圖8為驗(yàn)證程序的組成框圖。
仿真驗(yàn)證完成以后將其HDL CAN總線程序下載到FPGA中進(jìn)行測試,目標(biāo)芯片采用Cyclone系列的EP1C6Q240C8,為了驗(yàn)證所設(shè)計(jì)的FPGA CAN總線控制器,還設(shè)計(jì)了一款基于該FPGA的CAN總線控制器的節(jié)點(diǎn)電路,然后利用所設(shè)計(jì)的節(jié)點(diǎn)電路與其他3個(gè)利用SJA1000作為控制器的CAN總線節(jié)點(diǎn)進(jìn)行了通信測試。所有的節(jié)點(diǎn)使用AT89S52單片機(jī)作為節(jié)點(diǎn)微處理器,PCA82C250作為收發(fā)器,測試結(jié)果表明下載到FPGA中的控制器程序工作正常,實(shí)現(xiàn)了預(yù)計(jì)的CAN總線通訊功能。測試網(wǎng)絡(luò)示意圖如圖9所示。
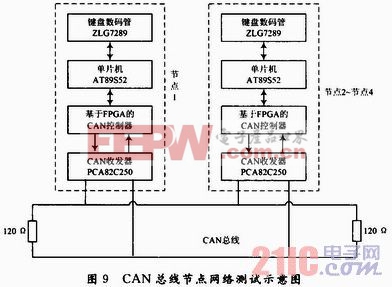
測試時(shí),按動節(jié)點(diǎn)1上的開關(guān)并將該狀態(tài)發(fā)送到節(jié)點(diǎn)2,在節(jié)點(diǎn)2上能顯示對應(yīng)的狀態(tài),反之也可。同時(shí)也可在節(jié)點(diǎn)2通過鍵盤輸入某一代碼,而在節(jié)點(diǎn)1上的數(shù)碼管上顯示相應(yīng)的結(jié)果。該實(shí)驗(yàn)結(jié)果表明下載到FPGA中的控制器程序工作正常。
3 結(jié)語
本項(xiàng)目利用Verilog HDL語言設(shè)計(jì)了一款CAN總線控制器芯片,并使用ModelSire軟件對所設(shè)計(jì)的CAN總線控制器進(jìn)行了功能仿真;之后為了驗(yàn)證設(shè)計(jì),還編制一個(gè)驗(yàn)證程序,并將驗(yàn)證之后的設(shè)計(jì)配置到了FPGA中;最后用所設(shè)計(jì)的基于FPGA的CAN總線控制器制作了CAN節(jié)點(diǎn),并與其他采用SJA1000為控制器的CAN節(jié)點(diǎn)進(jìn)行了通訊測試,實(shí)現(xiàn)了CAN總線良好的工作,驗(yàn)證了設(shè)計(jì)的正確性。











評論