基于DSP的傳感器制備系統的設計方案

基于光機電技術和控制理論,以TMS320LF2407A 數字信號處理器為核心,建立了一種數字式的傳感器制備系統。根據傳感器制備系統的機械原理、總體結構和各個組成部分的實現方式,提出了基于TMS320LF2407A 的控制系統的設計與實現。
本文引用地址:http://www.104case.com/article/160116.htm在分析血糖時,配置相關的一系列溶液,通過給金針或銀針按照特定的流程與方法鍍上溶液膜,一段反應時間后形成傳感器特性。為了達到自動化生產的目的,需要考慮相應的機械動作的實現方式、精確度、速度和位置要求等;由于生產過程中4 個溶液槽裝有不同的配置溶液,需要根據臨時的狀況人為地調整、控制每種溶液的鍍膜次數,所以,把整套系統分為4 個獨立的子系統,它們的機械動作和實現要求完全一樣。
系統的動作主要分為上下和前后位移,由于鍍膜過程中要求傳感器進出膜孔板的長度與時間都有相關的要求,考慮到生產時間的高效性,所以,采用變速的方式實現整個生產過程。機械部分通過步進電機帶動滾珠絲杠和導軌完成, 電子部分則采用TMS320LF2407A 實現對步進電機的控制。
機械設計原理
脈沖當量的確定
采用的脈沖當量為0.005 mm/ 步,若步進電機以1kHz 頻率工作,則1ms走一步,工作臺1s移動的距離為5mm.
確定步進電機的型號并驗算
系統選擇的是混合式步進電機,根據系統參數可計算出等效轉動慣量和負載轉矩。為了使步進電機獲得良好的啟動能力和較快的響應速度,轉動慣量和轉矩匹配條件分析為
J el/ Jm ≤4 , Tel/ Tmax ≤0.5
式中: J el為負載轉動慣量,kgm2 ; Jm 為步進電機自身的轉動慣量,kgm2 ; Tmax為步進電機的最大靜轉矩,Nm; Tel為負載等效力矩,Nm.
控制系統的設計與實現
控制系統結構框架見圖1。每個子系統都有4 鍵的鍵盤控制,功能分別為啟動、換板- 上升、換板- 下降、復位。
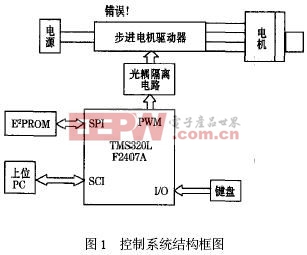
用LF2407 控制兩個步進電機,其事件管理器共可以產生16 路PWM 脈沖,而每個步進電機需要2 路PWM,一路用于轉向控制,一路用于步進控制。
通過LF2407 的SPI 口與E2PROM 通信,可以保證電機在掉電過程中不丟失信息,具體方法為每次中斷時通過SPI 向E2PROM 中寫入相應的電機控制參數,上電時bootlader 即可,而且電機驅動器有相位記憶功能,這樣就可以保證電機在掉電后的正常運行。
考慮系統運行過程中的一些突發事故, 利用PDPINTA/ B 引腳,連接一個光電隔離TPL521 ,就能實現過電流保護等故障保護功能。
由于系統中對步進電機的速度控制有一定要求,故需細分以保證平穩,采用SVPWM方法實現。
系統軟件設計
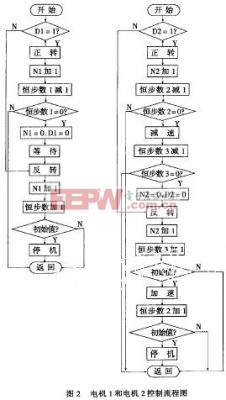
程序由6 大功能模塊組成,分別為初始化模塊、PWM設置模塊、鍵盤掃描塊、鍵盤服務模塊、電機控制模塊、SPI 收發模塊。電機控制模塊如圖2 所示,由于步進電機的運行頻率低于最高啟動頻率,所以,不必考慮加減速控制;中斷為定時器周期中斷。這樣,每次周期中斷調用一次電機控制模塊,實現對步進電機的速度、啟動與停止的控制。
結論
系統采用單片TMS320LF2407A ,充分利用了DSP豐富的片內資源和高速運算能力,保證了系統控制的實時性,有效地簡化了硬件設計。












評論