無線傳感器網絡中AOA節點定位改進算法研究

1.2 估計位置過濾
當未知節點的通信半徑內有多個錨節點時,對于任意不共線的兩個錨節點都能確定一個估計位置,由于錨節點的選擇問題,估計位置可能存在某些誤差較大的點,將這些估計位置排除,會提高系統的定位精度。
過濾誤差較大的估計位置的方法:假設有A(xa,ya),B(xb,yb),C(xc,yc),D(xd,yd),E(xe,ye)5個估計位置,首先計算任意兩個估計位置間的距離為Sij(如表1所示),Sij=。本文引用地址:http://www.104case.com/article/160072.htm
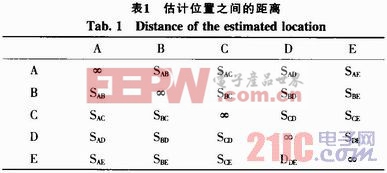
設定一個距離閾值d,且節點與自身的距離取為∞,當表中存在某一行的距離值均大于d時,認為該點為不可靠位置,不參與計算。若A、B、C、D為可靠位置,則將4個位置構成的幾何圖形的質心![]() 作為未知節點的最終估計位置。
作為未知節點的最終估計位置。
基于上述思想,對原有算法最后一步進行了求精,即求多個估計位置的平均值時,排除了誤差較大的位置,對算法進行了改進,為了陳述上的統一,對于改進后的算法稱為基于信號到達角度的改進定位算法(Improved AOA Localization Algorithm for Wireless Sensor Net work,IAOA)。
算法的適用條件:
1)無線傳感器網絡節點部署在二維平面內,傳感器節點都搭載有特殊硬件,可測得在通信半徑內的鄰居錨節點的信號到達的角度值。
2)只有當估計位置個數大于等于3個時,才進行估計位置的過濾。對于只有兩個估計位置的,直接取兩個點的中點作為節點的最后估計位置。當只有一個估計位置時,該位置則為節點的最終估計位置。
2 仿真分析
為檢驗改進算法的性能,用MATLAB仿真工具對基于信號到達角度的定位算法(AOA)和本文提出的算法(IAOA)進行仿真實驗。
2.1 仿真環境設置
在100 mx100 m的監測區域內,隨機部署傳感器節點。傳感器節點數目為N,錨節點數目為n,傳感器節點的通信半徑r,角度測量偏差△。
定位誤差:節點實際位置和估計位置之間的距離。
定位覆蓋率:能夠進行定位的未知節點數與總的未知節點個數之比。
為了保證實驗的準確性,針對不同情況,本文分別進行了多次仿真,觀察、統計仿真結果,對多次結果求平均作為最后的評價結果。












評論