某無人機飛控系統半實物仿真平臺設計

3.2 傳感器與機載測控模擬分系統
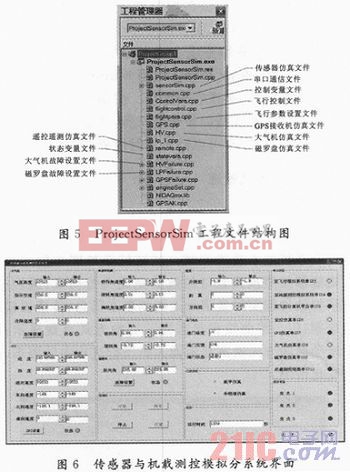
可以模擬GPS接收機、磁航向、大氣數據計算機等傳感器特性,通過數字或模擬信號的形式輸出到各相關分系統,供實際平臺仿真使用。可設置的故障類型包括:
GPS接收機失效、航向跳變、大數據計算機高度跳變。
(1)應用軟件開發環境的選擇
由于該應用軟件在設計過程時需要進行大量的軟件界面開發,而Borland公司的C++Builder集成開發環境的最大優點在于其軟件界面開發過程中的直接拖入方式,極大地方便了工程開發。因此選用C++Builder進行應用軟件開發。
(2)軟件總體設計構建
建立一個“ProjectSensorSim”的工程文件,包括如圖5所示的工程文件,運行該工程文件后,生成分系統軟件界面,如圖6所示。本文引用地址:http://www.104case.com/article/159932.htm
3.3 遙控/遙測模擬分系統
該分系統用于模擬地面測控站基本功能,用于完成遙控指令的發送、遙測數據的接收。軟件采用模塊化設計,包括二維曲線繪制、航路裝訂、保存與刪除、航跡繪制、串口處理、遙測數據接收、遙測信息處理、遙控指令處理等模塊。
3.4 無人機外形顯示分系統
外形顯示分系統采用VC++2010軟件,基于OpenGL進行開發。軟件模塊包括:通信接口模塊、三維演示模塊、儀表顯示模塊等。
3.5 軟件開發過程中的兩個關鍵問題
(1)降低系統間通信時間延遲技術
由于采用分布式、模塊化結構,各分系統之間通過串口通信,難免會產生通信時延問題,在軟件設計過程中采取了如下措施進行解決:
①減小飛行系統模擬軟件的仿真步長,增加了飛行參數的連續性;
②提高飛行系統模擬、傳感器與機載測控模擬與飛控計算機模擬三個分系統之間的姿態信息傳輸的串口波特率;
③優化傳感器與機載測控模擬分系統與其他分系統之間串口數據通信的幀結構;確保姿態信息以最短的時間到達飛控計算機。
(2)工控設備數據實時性處理技術
由于傳感器與機載測控模擬分系統采用工控機架構,需要同時與飛行系統模擬等多個分系統等進行數據通信,所有的任務均要求在毫秒級完成。在軟件設計中,采用在Windows環境下應用Multimedia Timer(多媒體定時器)結合多線程來實現。應用多媒體定時器是計算機從硬件上支持的精確定時器,其定時誤差一般可達到十微秒級,完全可以滿足實時性要求。
4 平臺功能測試驗證
4. 1 飛控系統仿真測試功能驗證
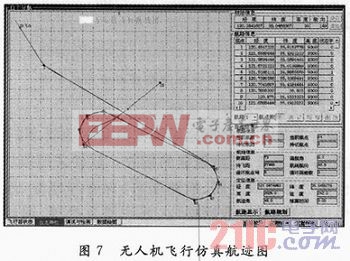
按圖1連接平臺各個組成部分,運行各應用軟件,進行全系統基本功能測試。測試結果如圖7所示。無人機能夠按照預先裝訂的航路完成飛行仿真;遙控/遙測模擬軟件能實時顯示無人機的姿態信息、傳感器模擬信息等,以二維曲線和狀態指示燈的方式直觀顯示;以三維動畫的方式逼真顯示無人機飛行過程中的姿態、高度變化情況。








評論