多傳感器智能輪椅的硬件系統(tǒng)設(shè)計

2.3 姿態(tài)傳感器
本系統(tǒng)區(qū)別于其他輪椅設(shè)計的一個最顯著的特點,就是本設(shè)計能夠僅僅依靠兩個輪子完成車體的平衡。這個顯著特征要求它有特殊的結(jié)構(gòu),基本的設(shè)計思想為:保持兩個輪子分別由獨立的直流電動機驅(qū)動,并且在一條軸線上,車體的重心保持在輪軸以上,使用檢測車體傾斜角度的傳感器實時地獲取車體的姿態(tài)信息,機器人的處理器將傳感器信號進行處理,按照一定的控制算法計算出控制量控制電動機的轉(zhuǎn)速和轉(zhuǎn)向,驅(qū)動機器人前進或后退,完成車體的平衡。
本智能輪椅采用一個傾角傳感器和一個陀螺儀的組合構(gòu)成姿態(tài)傳感器來檢測車體平臺的運行姿態(tài)。傾角傳感器用來測量輪椅偏離豎直方向的角度,陀螺儀用來測量角速度。
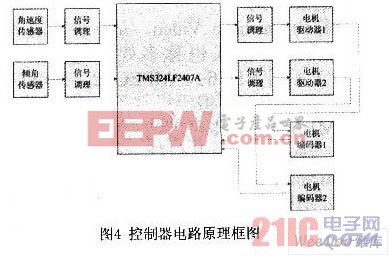
以TMS320LF2407A為控制核心的運動控制器,根據(jù)編碼器和姿態(tài)傳感器檢測到的平臺運行的位移和姿態(tài)信號,通過一定的控制策略計算出控制量,再經(jīng)脈寬調(diào)制控制及驅(qū)動器放大后驅(qū)動直流電動機運轉(zhuǎn),隨時調(diào)整車體平臺的運行速度,從而使車體平臺始終保持平衡狀態(tài)。控制電路原理圖如圖4所示。控制板采集來自傾角和角速度傳感器的信號并對信號進行調(diào)理(濾波、整形、偏移),然后將信號傳送到控制板中,經(jīng)過DSP的運算處理(控制算法由電動車系統(tǒng)的數(shù)學(xué)模型推導(dǎo)而出),通過DSP的兩路脈寬調(diào)制將控制信號發(fā)出,再經(jīng)過電機驅(qū)動模塊驅(qū)動電機運轉(zhuǎn),控制輪椅保持平衡狀態(tài)。
2.4 攝像頭
用于感知環(huán)境的深度信息,如判斷前方是否有樓梯以及提取樓梯的高度信息,提取路途標(biāo)志物用以導(dǎo)航等等。攝像頭可直接通過USB與PC機通訊,在這里不再另外敘述。
3 結(jié)束語
本文設(shè)計了用于智能輪椅的多傳感器環(huán)境感知系統(tǒng),對各數(shù)據(jù)采集子系統(tǒng)做了詳細的介紹,采用簡單可靠的硬件電路感知環(huán)境信息。經(jīng)實驗證明,此系統(tǒng)方案具有硬件電路結(jié)構(gòu)簡單、工作可靠、精度高、重復(fù)性好等特點,而且采取了模塊化設(shè)計,可以更方便地添加新研制的功能模塊和進行技術(shù)更新,便于消費者根據(jù)自身生活需要,選擇和組合各模塊,使各功能模塊得到充分的應(yīng)用,從而能夠滿足不同消費階層的需要。












評論