多傳感器智能輪椅的硬件系統設計

摘要:為了提高智能輪椅在復雜環境下獲取有效信息的能力,提出了一種基于DSP的多傳感器數據采集系統。該系統主要包括:超聲傳感器、接近開關、自定位傳感器、姿態傳感器和視覺傳感器。本文主要對系統構架、組件設計進行了分析和闡述。
本文引用地址:http://www.104case.com/article/159797.htm0 引言
智能輪椅的任務是安全、便捷地把用戶送到目的地,完成既定任務。在運動過程中,輪椅既需要接受用戶的指令,又需結合環境信息啟動自身避障、導航等功能模塊,與移動機器人不同的是,在使用過程中,輪椅與用戶成為一個協同工作的系統。這就要求在設計之初就把人這個因素納入考慮之中,所以,安全、舒適和容易操作應成為智能輪椅設計中最重要的因素;使用者身體能力的差異決定了智能輪椅需被設計為一個功能多元化,能滿足多種層次需要的電子系統,而模塊化最能體現系統多功能化的特征,每個用戶都能根據其自身殘障類型和程度選擇適當的模塊集成,且設計者可以在現有基礎上通過增添功能模塊,很方便地對輪椅功能進行改進。本文著重就智能輪椅模塊化設計進行了闡述。
1 傳感器系統總體結構設計
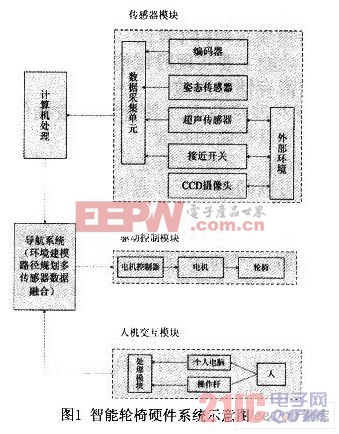
智能輪椅的總功能可以分為以下幾個子功能:環境感知及導航功能、控制功能、驅動功能和人機交互功能。通過對智能輪椅的功能分析和模塊劃分,再結合具體的研究內容和期望控制目標,本系統主要由傳感器模塊、驅動控制模塊和人機交互模塊3部分組成,硬件系統結構如圖1所示。其中傳感器模塊主要有內部狀態感知和外部環境感知兩部分構成,通過姿態傳感器確定輪椅自身的位姿信息;通過編碼器的位移速度和距離獲得自定位信息;視覺、超聲波和接近開關主要負責持續獲得周圍環境和障礙物的距離信息。驅動控制模塊我們采用后輪驅動的方式,每一個后輪配置一個電動機,在控制器的操作下實現電動輪椅的前進、后退和轉向。人機交互界面由操作桿和個人電腦界面數據輸入兩種方式,實現基本的人機交互功能。
其中,數據采集單元擬選擇DSP TMS320LF2407A作為傳感器模塊的控制芯片。TMS320LF2407A是一款高性能的數字信號處理器,它具有較高的頻率,豐富的外圍接口。它的主頻可達150MHz、低功耗(核電壓1.8V,I/O電壓3.3V);128kXl6位片上FLAsH,18kXl6位片上SRAM,4kXl6位片上ROM;用于電機控制的外設,2個事件管理器;多種標準串口外設,1個SPI同步串口、2個UART異步串口、1個增強型CAN總線接口、1個McBSP同步串口;16通道的12位A/D轉換器;56個獨立可編程、復用型、通用I/O口。能夠符合本系統設計的要求。
2 多傳感器數據采集與處理
本系統的智能輪椅有2個獨立的驅動輪,各自配備一個電機碼盤。由2個電機碼盤的實時檢測數據構成了里程計式的相對定位傳感器,同時安裝了傾角傳感器和陀螺儀來測量輪椅在行進過程中的姿態狀態。超聲波傳感器和接近開關被用于感知周圍環境信息。為獲取更大范圍內的障礙物信息,本系統配備了8個紅外傳感器和8個超聲波傳感器。另外安裝了一個CCD攝像頭用于判斷前方行進路程中的深度信息。
以下依次介紹上面幾種傳感器的硬件設計方案。












評論