基于自適應模糊PID控制的太陽光跟蹤伺服系統

4 仿真結果分析
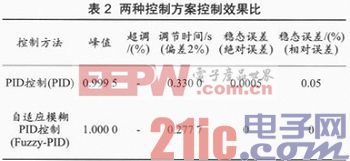
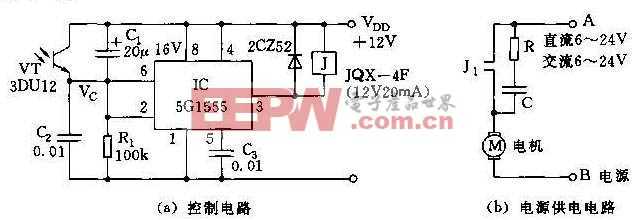
本文在Simulink環境中搭建了PID控制仿真模型和自適應模糊PID控制仿真模型。其中,KP,KI,KD保持文獻中所提供的參數:KP=1.81 KI=0.4,KD=0.158。對仿真模型施加單位階躍輸入信號,仿真時間為5 s。其響應曲線如圖4所示,誤差變化曲線如圖5所示,表2所列是其控制效果。本文引用地址:http://www.104case.com/article/159674.htm
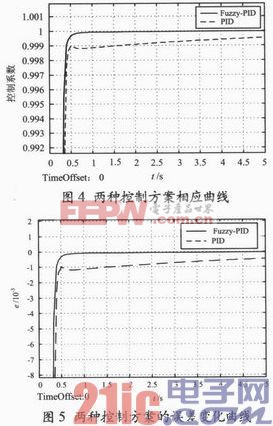
從圖4、圖5及表2兩種控制方法的仿真結果對比來看,這種自適應模糊PID控制響應的速度較傳統的PID要快。在穩態誤差方面,自適應模糊PID控制較傳統的PID小。綜上所述,本太陽能伺服系統中的自適應模糊PID控制器具有響應時間短、穩態誤差小等特點,而且系統也具有更好的適應性和魯棒性。
5 結語
本文采用自適應模糊PID控制器對文獻中提出的雙軸跟蹤伺服系統模型進行控制。通過在Simulink環境中的仿真結果發現,自適應模糊PID控制器較文獻中傳統的PID控制器具有較強的穩定性、適應性與魯棒性,因而在雙軸跟蹤伺服系統的控制過程中具有重要的實用價值與應用空間。








評論