基于自適應模糊PID控制的太陽光跟蹤伺服系統

3.2 確定語言變量和語言值的隸屬度函數
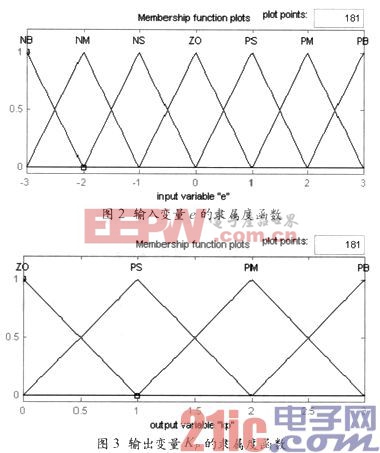
設定輸入誤差e的語言變量為E,誤差變化率的語言變量為EC,兩者的論域都為{-3,-2,-1,0,1,2,3},相應的語言值為{負大(NB),負中(NM),負小(NS),零(ZO),正小(PS),正中(PM),正大(PB)};輸出KP的語言變量為△KP,KI的語言變量為△KI,KD的語言變量為△KD,三者的論域都為{0,1,2,3},相應的語言值為{零(ZO),正小(PS),正中(PM),正大(PB)}。輸入輸出變量的隸屬度函數采用三角函數。圖2所示是輸入變量e的隸屬度函數,輸出變量KP的隸屬度函數如圖3所示。本文引用地址:http://www.104case.com/article/159674.htm
3.3 建立模糊控制規則
PID參數的適應必須考慮到在不同時刻三個參數的作用以及相互之間的互聯關系。對于不同的誤差e和誤差變化率,控制器參數的自整定原則可歸納如下:
(1)當誤差較大時,為使系統具有較好的快速跟蹤性能,應取較大的KP和較小的KD參數;同時為避免系統響應出現較大的超調,應對積分作用加以限制,并取較小的KI。
(2)當誤差處于中等大小時,為使系統響應具有較小的超調,KP應取小一些;同時為保證系統的響應速度,KI和KD的大小要適中。
(3)當誤差較小時,為保證系統具有較好的穩態特性,KP和KI應取得大一些。同時為避免系統在設定值附近出現振蕩,并考慮系統的抗干擾性能,當誤差變化率較小時,KD可取大些;當誤差變化率較大時,KD應取小一些。
按以上原理并根據PID參數自適應原則和操作經驗所列出的輸出變量模糊控制規則如表1所列。

3.4 模糊量的清晰化
所謂模糊量的清晰化,就是把模糊推理后得到的模糊集轉化為控制的數字值。這里采用重心法對模糊量進行清晰化。重心法是取隸屬度函數曲線與橫坐標圍成面積的重心作為模糊推理的最終輸出值,即:









評論