基于滑模變結構的直流伺服電機控制器設計

2.3切換函數s的選取
2.4控制量u的求取
2.5系統穩定性分析
3仿真與結論
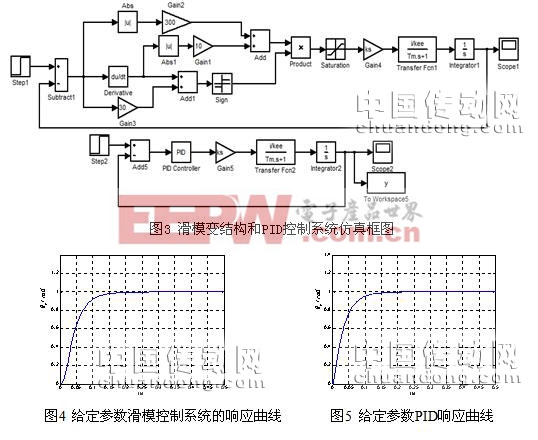
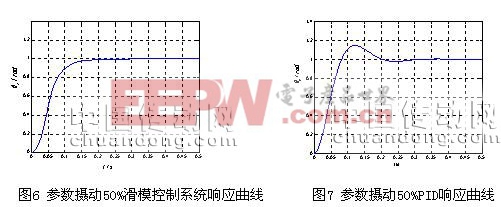
由仿真結果可以看到,顯然,當有電機參數大幅攝動時,滑模變結構控制系統能適應系統參數的變化,響應時間很快,很快達到穩態,無超調;而PID產生了大幅度的超調,對于直流伺服電機控制系統而言,超調過大,嚴重影響加工等過程。
5結束語
本文通過對直流伺服系統分析,并對其設計了滑模變結構控制策略,設計方法簡單,易于實現。從仿真分析可知,滑模變結構控制優于PID控制,具有較強抑制參數攝動,自適應強。另外合理地選擇切換函數和控制率參數,滑模變結構控制系統具有快速性好、無超調、無靜差的優良動、靜態性能,而且系統參數攝動時,具有很好的魯棒性。本文引用地址:http://www.104case.com/article/159668.htm

伺服電機相關文章:伺服電機工作原理










評論