無源自適應控制Buck-Boost變換器研究

2.3 Buck-Boost變換器的無源控制器設計
將Buck-Boost變換器的狀態空間方程整理為:
通過間接控制期望值Iref得到d,進而控制系統輸出電壓,使其輸出漸近穩定于期望輸出。
3 無源控制仿真研究
Buck-Boost變換器元件參數:L=400μH,C=200 μF,R=50 Ω,E=12 V,開關頻率為40 kHz,穩態時d=0.5,期望輸出電壓為12 V。注入阻尼值R1=0.5,參考電感電流設置為1.618 A。圖2為變換器僅使用無源控制時負載電壓的輸出響應。
由圖2a可知,無擾動時上升時間約為5.4 ms,輸出電壓無超調,調節時間約為7.4 ms,穩態輸出電壓(12+0.013)V。圖2b為系統輸入電源在0.06 s時發生33.3%擾動變化后(電壓由12 V變化到8 V)負載電壓輸出響應,系統穩態輸出只有(8.28±0.008)V,不能滿足穩態要求。本文引用地址:http://www.104case.com/article/159638.htm
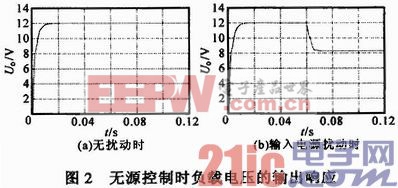
仿真結果表明:在無擾動時,無源控制使得變換器的輸出電壓快速恢復到穩定狀態,適當選取注入的阻尼值可減小輸出電壓振蕩,縮短系統調節時間。但當輸入電源寬范圍擾動時,無源控制不能使輸出電壓恢復到期望值。
4 無源自適應控制器的設計
4.1 模型參考自遺應控制結構的建立
鑒于單純使用無源控制器無法解決寬范圍電源輸入擾動的問題,此處提出無源自適應控制策,結構框圖如圖3所示,其基本思想是:將Buck-Boost變換器期望輸出的恒值電壓X2ref作為參考模型,無源控制器和Buck-Boost變換器共同作為可調模型(虛線框所示),自適應律作為自適應機構,建立模型參考自適應控制結構。
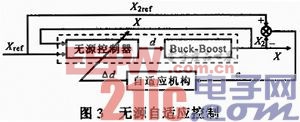
參考模型和可調模型被Xref所激勵,X2ref和X2分別為參考模型和可調模型的狀態。X2ref規定了Buck-Boost變換器期望輸出的電壓,這里選用X2ref保證了參考模型的準確性;而X2是實際測量到的Buck-Boost變換器輸出電壓。X2ref與X2比較后得到e,將e輸入自適應機構,由自適應機構來修改可調模型的參數,即變換器開關占空比d,使得X2能快速穩定地逼近X2ref。

pid控制器相關文章:pid控制器原理
評論