噴漿機器人電液伺服系統的模糊自適應整定方法

模糊自適應PID控制器的輸出變量為,有

其中,
模糊邏輯控制器的輸入為
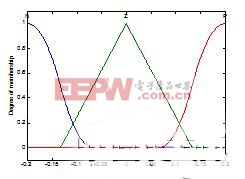
圖5 隸屬度函數
模糊控制規則是由專家知識,操作經驗和系統知識預先設定的,因此我們根據電液伺服系統的特性,設置新的模糊規則如表I~III所示。

4 仿真研究
給定工作臂期望轉角階躍信號
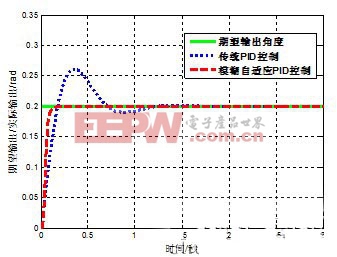
圖6 電液伺服系統階躍響應
由上圖可見傳統PID控制有明顯的超調現象,并有輕微的震蕩,這對電液位置伺服系統對機械手的控制十分不利。我們通過模糊邏輯調節PID參數,應用模糊自適應控制器對系統進行優化控制,比較可見,模糊自適應PID控制可以有效地改善動態和靜態性能,能夠消除震蕩,并且響應時間短,有效抑制系統的超調現象,提高了系統的抗擾動能力。
5 結論
本文通過模糊邏輯調節PID參數,設計的電液伺服系統的模糊自適應整定PID控制方法,能夠實現對PID參數的在線最佳調整,并獲取最優控制參數。可以有效地改善動態和靜態性能,有效抑制系統的超調現象,提高了系統的抗擾動能力,這對在實際應用中電液位置伺服系統對噴漿機器人的控制是十分有利的。本文引用地址:http://www.104case.com/article/159600.htm










評論