碟式斯特林太陽自動跟蹤控制系統(tǒng)設(shè)計(jì)

2.4 碟轉(zhuǎn)向機(jī)構(gòu)
在時(shí)刻t,太陽的高度角h和太陽的方位角α分別為:

其中,φ為當(dāng)前碟安裝地點(diǎn)的地理緯度,δ為太陽的赤緯角,ω為太陽時(shí)角。
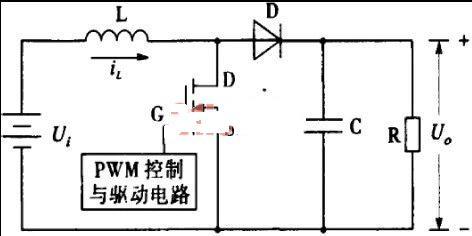
碟轉(zhuǎn)向機(jī)構(gòu)主要由水平方向調(diào)整電機(jī)、俯仰方向調(diào)整電機(jī)和減速箱組成。當(dāng)ATmega128單片機(jī)根據(jù)M12模塊得到當(dāng)前位置的經(jīng)緯度和時(shí)間,根據(jù)公式(1)、(2)計(jì)算出當(dāng)前的太陽高度角增量和方位角增量,輸出一定數(shù)量的PWM信號,驅(qū)動電機(jī)在水平和俯仰兩個(gè)方向上進(jìn)行調(diào)整,實(shí)現(xiàn)對太陽的初步跟蹤。
2.5 反饋調(diào)整部分
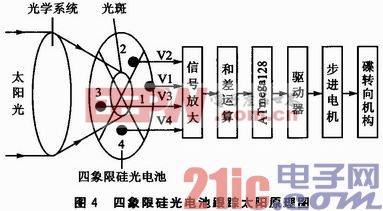
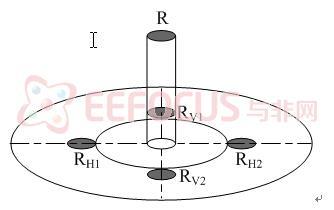
如圖4所示,系統(tǒng)采用四象限硅光電池作為太陽跟蹤誤差校正用傳感器。假設(shè)太陽光經(jīng)光學(xué)系統(tǒng)在四象限硅光電池上成一圓斑狀的光斑且分布均勻,設(shè)其中心坐標(biāo)為(X,Y)。當(dāng)?shù)骄酃馄鲗?zhǔn)太陽時(shí),四象限硅光電池的光軸對準(zhǔn)太陽,圓斑的中心在光軸上,四個(gè)象限的硅光電池接收到相同的光功率,輸出相同的電壓信號,經(jīng)過和差運(yùn)算放大器對信號處理后,輸出為零。當(dāng)?shù)骄酃馄魑磳?zhǔn)太陽時(shí),即四象限硅光電池的光軸未對準(zhǔn)太陽,則太陽光與光軸成一角度θ,光線經(jīng)光學(xué)系統(tǒng)照射到四象限光電池上形成的光斑必然發(fā)生偏移(X≠0,Y≠0),則各象限光電池產(chǎn)生的電壓不盡相同。和差運(yùn)算放大器的輸出也隨之產(chǎn)生相對位移方向上的正負(fù)變化,ATmega128單片機(jī)根據(jù)該變化計(jì)算出需要調(diào)整的角度,輸出PWM信號,使俯仰角電機(jī)和方位角電機(jī)轉(zhuǎn)動,直到和差運(yùn)算放大器輸出為零,表明系統(tǒng)已經(jīng)對準(zhǔn)太陽。根據(jù)以上原理即可對碟式聚光器位置誤差進(jìn)行校正。本文引用地址:http://www.104case.com/article/159588.htm
2.6 觸模屏
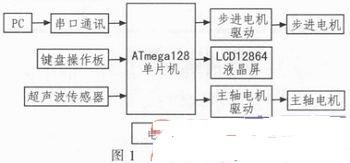
觸模屏主要用來對碟式斯特林系統(tǒng)進(jìn)行參數(shù)設(shè)置或運(yùn)行控制,并對系統(tǒng)的實(shí)時(shí)運(yùn)行狀態(tài)輸出顯示,是一個(gè)帶觸摸功能的工業(yè)平板電腦。與ATmega128單片機(jī)之間通過RS-232進(jìn)行信息交換。
3 系統(tǒng)軟件描述
ATmega128單片機(jī)軟件開發(fā)采用Atmel公司的AVR STUDIO3.53集成開發(fā)環(huán)境,提供AVR ASSEM-BLER編譯器、AVR STUDIO調(diào)試功能、AVR PROG串行/并行下載功能、JTAG ICE仿真功能,本設(shè)計(jì)采用的是JTAG ICE仿真調(diào)試。軟件設(shè)計(jì)包括單片機(jī)初始化設(shè)計(jì)、GPS模塊接口程序設(shè)計(jì)、主程序設(shè)計(jì)和上位機(jī)程序設(shè)計(jì)。
3.1 單片機(jī)初始化設(shè)計(jì)
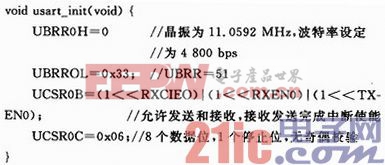
ATmega128單片機(jī)在工作前,需要對其進(jìn)行初始化,主要設(shè)置ATmega128單片機(jī)以及外設(shè)的工作方式,使其能滿足系統(tǒng)工作要求。初始化工作主要有I/O端口初始化、ADC初始化、PWM初始化和串行口初始化等。其中串行口初始化usart0_init()的程序如下:
3.2 GPS模塊接口程序設(shè)計(jì)
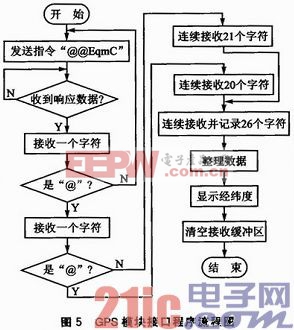
系統(tǒng)只需要M12模塊提供經(jīng)緯度,單片機(jī)與M12的接口程序流程如圖5所示。ATmega128首先請求M12模塊輸出定位數(shù)據(jù)(向M12模塊發(fā)出指令“@@EqmC”),然后等待M12模塊回送數(shù)據(jù)。當(dāng)M12模塊回送數(shù)據(jù)后,ATmega128首先做出判斷,確認(rèn)其收到的是否為預(yù)期的定位信息,然后將定位信息(經(jīng)緯度數(shù)據(jù))截取下來,最后將串口的接收緩沖區(qū)清空,以免下次接收信息時(shí)出錯(cuò)。

評論