基于干擾觀測(cè)器的伺服系統(tǒng)PID控制方法研究

4仿真研究
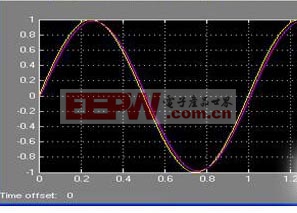
圖5 無干擾觀測(cè)器時(shí)的正弦跟蹤
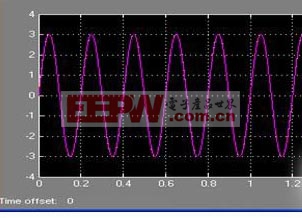
圖6 有干擾觀測(cè)器時(shí)的正弦跟蹤
5結(jié)論
從仿真曲線中可以發(fā)現(xiàn),采用常規(guī)PID控制時(shí),在跟蹤期望信號(hào)過程中,有強(qiáng)烈的極限環(huán)振蕩且不能很好地跟蹤期望信號(hào);而采用PID控制器與干擾觀測(cè)器的組合控制在跟蹤期望信號(hào)過程中,干擾觀測(cè)器對(duì)系統(tǒng)和測(cè)量信號(hào)具有較好的抑制作用,系統(tǒng)的極限環(huán)振蕩現(xiàn)象消失、其能較好地跟蹤期望信號(hào)。因此,該控制系統(tǒng)具有較強(qiáng)的適應(yīng)性和魯棒性。
本文引用地址:http://www.104case.com/article/159580.htm









評(píng)論