基于干擾觀測器的伺服系統PID控制方法研究

1引言
隨著高新技術的應用與發展,對控制系統性能的要求越來越高。在伺服系統控制器[1]的設計中,在系統參數變化以及外界擾動的干擾下的伺服控制系統的干擾抑制性能和魯棒性能是非常重要的[2]。采用常規PID控制難以達到令人滿意的控制效果。為了提高伺服控制系統的控制精度和魯棒性,本文提出了基于干擾觀測器的改進PID控制方法[3]。該方法能夠很好地提高系統的跟蹤精度,同時引入干擾觀測器,可對系統的摩擦干擾進行很好地抑制,提高系統的魯棒性。
2干擾觀測器的設計原理
干擾觀測器[4]的基本思想是,將外部力矩干擾及模型參數變化造成的實際對象與名義模型輸出的差異等效到控制輸入端,即觀測出等效干擾。在控制中引入等效的補償,實現對干擾完全控制。基本結構如圖1所示: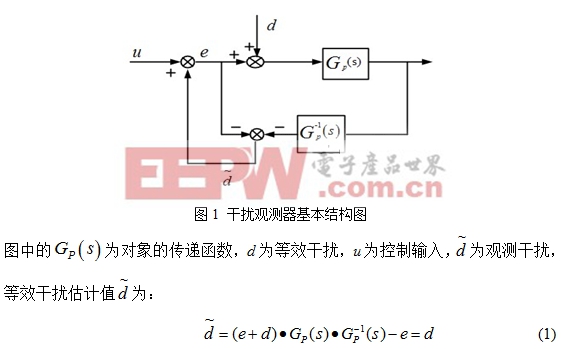
3干擾觀測器的設計原理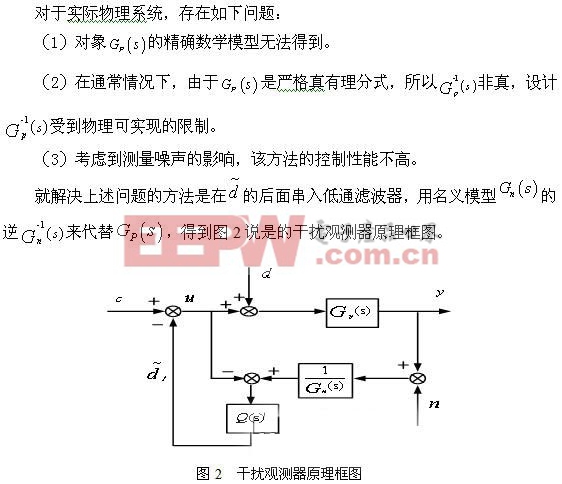









評論