自適應模糊PID控制的太陽光跟蹤伺服系統

2 被控對象模型
目前,關于太陽能伺服系統模型大多是對直流電機建模,并沒有考慮到系統參數對跟蹤系統的影響。文中采用的被控對象為文獻中提出的基于步進電機的雙軸跟蹤伺服系統,其基本功能是使光伏陣列快速、平穩且準確地跟蹤定位太陽光源。利用天文知識可以精確地獲得太陽高度角和方位角。太陽光源跟蹤伺服系統時刻檢測光伏陣列和太陽光源的位置并將其輸入到驅動運算單元,并產生輸出信號驅動兩部電機,分別在水平面和鉛錘面內運動,使太陽光時刻垂直入射到光伏陣列的表面上,達到準確和快速跟蹤太陽光源的目的。太陽能光源跟蹤伺服系統如圖2所示。本文引用地址:http://www.104case.com/article/159556.htm
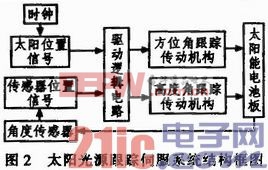
由于高度角跟蹤傳動機構與方位角傳動機構工作時互不影響,下面以方位角跟蹤傳動機構為例進行建模和仿真研究。由文獻可知,方位角跟蹤傳動機構的傳遞函數為:![]()
3 自適應模糊PID控制器的設計
該控制系統設計的關鍵是要先找出3個參數與誤差e和誤差變化率ec之間的模糊關系,要求在系統運行中不斷檢測e和ec,根據模糊控制原理對3個參數進行在線修正以滿足不同情況下對參數的不同要求,最終獲得良好的動態和靜態控制性能。
3.1 確定模糊控制器的結構
基于對系統的上述分析,模糊控制器采用兩輸入、三輸出的控制器,將誤差e和誤差的變化率ec作為輸入,將PID控制器的3個參數的修正值作為輸出。KP,KI,KD參數調整算式如下:
3.2 確定語言變量并確定語言值的隸屬度函數
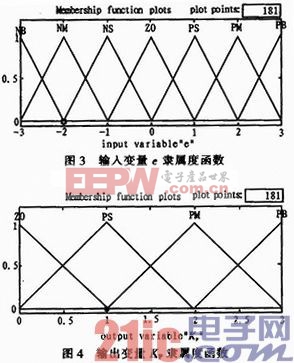
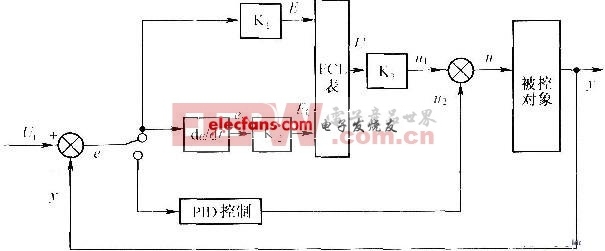
設定輸入誤差e的語言變量為E,誤差變化率ec的語言變量為EC,兩者的論域都為{-3,-2,-1,0,1,2,3},相應的語言值為{負大(NB),負中(NM),負小(NS),零(ZO),正小(PS),正中(PM),正大(PB)};輸出△KP的語言變量為△KP、△KI的語言變量為△KI、△KD的語言變量為△KD,三者的論域都為{0,1,2,3},相應的語言值為{零(ZO),正小(PS),正中(PM),正大(PB)}。輸入輸出變量的隸屬度函數采用三角函數。輸入變量e的隸屬函數如圖3所示,輸出變量△KP的隸屬函數如圖4所示。
3.3 建立模糊控制規則
PID參數的適應必須考慮到在不同時刻3個參數的作用以及相互之間的互聯關系。對于不同的誤差e和誤差的變化率ec,控制器參數的自整定原則可歸納如下:1)當誤差較大時,為使系統具有較好的快速跟蹤性能,應取較大的KP和較小的KD參數,同時為避免系統響應出現較大的超調,應對積分作用加以限制,取較小的KI;2)當誤差處于中等大小時,為使系統響應具有較小的超調,KP應取小一些,同時為保證系統的響應速度,KI和KD大小要適中;3)當誤差較小時,為保證系統具有較好的穩態特性,KP和KI應取得大一些,同時為避免系統在設定值附近出現振蕩,并考慮系統的抗干擾性能,當誤差變化率較小時,KD可取大些,當誤差變化率較大時,KD應取小一些。





評論