基于滑模控制的TSMC-PMSM調速系統

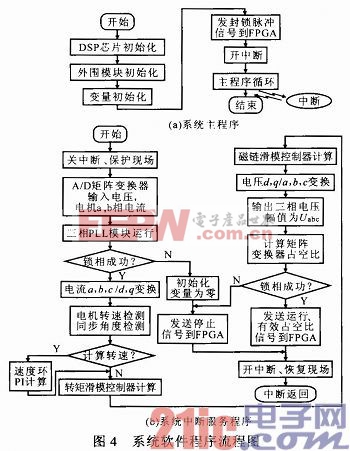
TSMC主電路由整流級、箝位電路以及逆變級構成。逆變級由PM75RLA120型IPM組成的通用逆變器構成,其自帶驅動電路,極大地簡化了驅動電路的設計。整流級由12個分立式1MBH60D-100型IGBT構成,共發射極連接構成雙向開關。采用集成驅動芯片M57962驅動。此系統軟件程序流程圖如圖4所示。本文引用地址:http://www.104case.com/article/159524.htm
系統控制對象PMSM參數為:額定電壓220 V;額定電流3.2 A;額定轉速3 000 r·min-1;定子電阻2.4 Ω;直軸電感8.62mH;交軸電感10.5mH;極對數為2。系統TSMC輸入端濾波電感大小為0.8mH;濾波電容為30μF;開關頻率為10kHz。通過實驗得到波形如圖5,6所示。
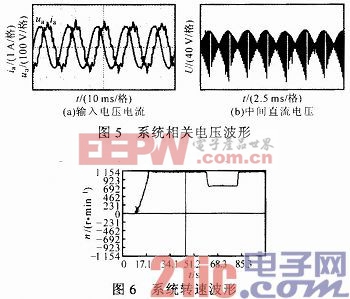
圖5a為TSMC整流級輸入a相電壓電流波形。由圖可見,此時電壓相位超前電流,這是由TSMC輸入端濾波器呈容性所致,但超前相位較小,輸出側基本呈單位功率因數。圖5b為閉環調速時TSMC中間直流電壓波形。圖6為實際轉速波形。實驗過程中,系統初始轉速給定為零,在10 s時刻轉速給定切換為1 125 r·min-1,在60 s時刻轉速給定切換為750 r·rain-1,之后在80 s時切換回1 125 r·min-1。由圖可見,系統在轉速突變時動態響應很快,穩態轉速誤差小,無抖振,具有較強的魯棒性。
6 結論
這里設計了一種基于雙級矩陣變換器的永磁同步電機滑模變結構直接轉矩控制方案。該控制方法克服了滯環直接轉矩控制中轉矩和磁鏈脈動大的不足。針對一般滑模控制器的抖振問題,設計了積分滑模面、符號函數平滑和變指數趨近率,解決了滑模變結構固有的抖振問題。設計并實現了實驗樣機,實驗結果驗證了永磁同步電機的高性能調速,同時網側基本實現了單位功率因數,達到了很好的實驗效果。














評論