分布式傳感器網(wǎng)絡(luò)環(huán)境的多目標(biāo)跟蹤和特征管理設(shè)計(jì)

近來傳感器技術(shù)和無線通信技術(shù)的發(fā)展導(dǎo)致了一個(gè)新概念的誕生一傳感器網(wǎng)絡(luò),即一個(gè)由本地傳感器節(jié)點(diǎn)所組成的具有感知、處理和通信能力的一種廣泛應(yīng)用的網(wǎng)絡(luò)。為了更深入地挖掘傳感器網(wǎng)絡(luò)所具有的能力,筆者提出了一種可擴(kuò)展分布式的多目標(biāo)跟蹤和特征管理方法,該方法能夠通過一個(gè)傳感器網(wǎng)絡(luò)對(duì)多個(gè)目標(biāo)實(shí)現(xiàn)跟蹤和特征管理。
本文引用地址:http://www.104case.com/article/159512.htm傳統(tǒng)的多目標(biāo)跟蹤方法,如MHT跟蹤器,不適用于傳感器網(wǎng)絡(luò)。而現(xiàn)有基于傳感器網(wǎng)絡(luò)的算法僅基于如下情況:所跟蹤目標(biāo)的數(shù)量已知不變,并且它們的運(yùn)動(dòng)軌跡對(duì)于本地傳感器已知。而在本文中,筆者放寬了以上假設(shè),形成對(duì)于分布式多目標(biāo)的跟蹤和特征管理算法DMTIM。文中在實(shí)現(xiàn)數(shù)據(jù)關(guān)聯(lián)和多目標(biāo)跟蹤運(yùn)用了馬爾科夫鏈蒙特卡羅數(shù)據(jù)關(guān)聯(lián)MCMCDA的方法,實(shí)時(shí)對(duì)未知數(shù)量的多目標(biāo)進(jìn)行跟蹤。MCMCDA方法能夠獨(dú)立地對(duì)軌跡進(jìn)行起始和終止,并能夠跟蹤未知數(shù)量的多目標(biāo)。每個(gè)傳感器能夠運(yùn)用MCMCDA有效地跟蹤一組未知數(shù)量的目標(biāo),并且能夠?qū)δ繕?biāo)的特征進(jìn)行分布式地管理。
本文結(jié)構(gòu)如下:分布式多目標(biāo)的跟蹤與特征管理算法概述;多目標(biāo)跟蹤問題及其概率模型;DMTIM關(guān)鍵算法敘述:馬爾科夫鏈蒙特卡羅數(shù)據(jù)關(guān)聯(lián)算法;DMTIM組成部分介紹,包括數(shù)據(jù)關(guān)聯(lián)、多目標(biāo)跟蹤、特征管理和信息融合;DMTIM算法仿真試驗(yàn)及評(píng)估。
1 分布式多目標(biāo)跟蹤和特征管理
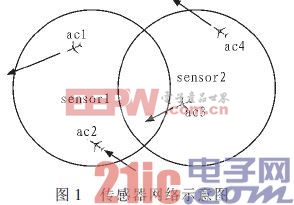
文中研究重點(diǎn)是傳感器網(wǎng)絡(luò)中多目標(biāo)的跟蹤和特征管理方法。每個(gè)傳感器擁有自己的觀測區(qū)域,且擁有與其鄰近傳感器通信的能力。如圖1所示一個(gè)簡單的二傳感器的系統(tǒng),大圓圈代表傳感器的觀測區(qū)域。每個(gè)傳感器能夠?qū)Χ嗄繕?biāo)進(jìn)行跟蹤并在觀測區(qū)域內(nèi)管理目標(biāo)特征。該問題的難點(diǎn)在于觀測區(qū)域內(nèi)目標(biāo)的數(shù)量會(huì)隨時(shí)間而變化,因此我們必須尋求一種可擴(kuò)展的,在相鄰傳感器中具有本地一致性的方法。
筆者提出的可擴(kuò)展的分布式多目標(biāo)跟蹤與特征管理DMTIM算法能對(duì)未知數(shù)量且數(shù)量隨時(shí)變化的機(jī)動(dòng)目標(biāo)進(jìn)行跟蹤,對(duì)其特征進(jìn)行有效的管理。并能夠在一個(gè)分布式的傳感器網(wǎng)絡(luò)中進(jìn)行實(shí)現(xiàn)。對(duì)于每一個(gè)傳感器,DMTIM中的多目標(biāo)跟蹤算法負(fù)責(zé)估算如下量:目標(biāo)的數(shù)量,觀測區(qū)域內(nèi)所有目標(biāo)的運(yùn)動(dòng)軌跡,以及在特征管理算法中將用到的混合矩陣和本地信息。然后,相鄰的傳感器通過相互通信對(duì)本地狀態(tài)估算值和信任矩陣進(jìn)行交換。同時(shí),通過信息融合實(shí)現(xiàn)了本地一致性,進(jìn)而實(shí)現(xiàn)全局一致性。
本文的剩余部分對(duì)DMTIM的算法模塊進(jìn)行了詳細(xì)描述并且還對(duì)多目標(biāo)跟蹤問題,以及馬爾科夫鏈蒙特卡洛數(shù)據(jù)關(guān)聯(lián)進(jìn)行了描述。
2 多目標(biāo)跟蹤
基于每個(gè)傳感器視野范圍內(nèi)的目標(biāo)數(shù)量會(huì)隨時(shí)間不斷變化,本章提出的DMTIM多目標(biāo)跟蹤適應(yīng)于此類多目標(biāo)數(shù)量不確定的情況。
2.1 問題模式
設(shè)T∈Z+為傳感器觀測持續(xù)的時(shí)間,K為該時(shí)間內(nèi)觀測范圍R中所出現(xiàn)的目標(biāo)數(shù)量。在某時(shí)間段
Y的集合,且ω∈Ω,有如下參數(shù):
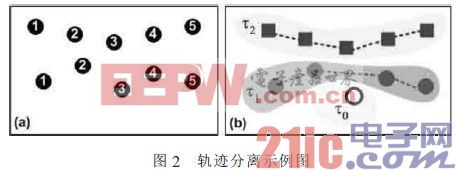
分離的過程如圖2所示,其中K為軌跡數(shù)量,|Tk|為Tk的基數(shù),當(dāng)沒有軌跡互擾的情況下認(rèn)為Tk為一個(gè)正確的軌跡。假設(shè)一條軌跡至少包含兩個(gè)觀測值,因?yàn)椴荒苡梢粋€(gè)單一的觀察值確定一條軌跡。于是再假設(shè)e(t-1)為時(shí)刻t-1之后目標(biāo)的數(shù)量,z(t)為時(shí)刻t消失的目標(biāo)的數(shù)量,c(t)=e(t-1)-z(t)為時(shí)刻t-1到t未消失的數(shù)量。設(shè)a(t)為時(shí)刻t新出現(xiàn)的目標(biāo),d(t)為時(shí)刻t的實(shí)際目標(biāo),g(t)=c(t)+a(t)-d(t)為未識(shí)別的目標(biāo)。最后,設(shè)f(t)=n(t)-d(t)為錯(cuò)誤報(bào)警數(shù)量,有:
其中P(ω|Y)是Y的相似概率。
本文采用了最大后驗(yàn)MAP算法解決多目標(biāo)跟蹤問題。該算法對(duì)觀測目標(biāo)進(jìn)行分割,并根據(jù)分割對(duì)目標(biāo)狀態(tài)進(jìn)行估算。










評(píng)論