無線遙控小車

2.2 基于PT2262/PT2272無線通信模塊
2.2.1 PT2262/PT2272芯片簡介
編碼芯片PT2262以及解碼芯片PT2272是臺灣普城公司生產的一種CMOS工藝制造的低功耗、低價位的通用編解碼電路,是目前在無線通信電路中較為常用的芯片。PT2262/PT2272最多可有12位(A0~A11)三態(懸空,接高電平,接低電平)地址設定管腳,任意組合可提供531 441個地址碼。PT2262最多可有6位(D0~D5)數據端管腳,設定的地址碼和數據碼從17腳(Dout)串行輸出。
PT2272解碼芯片有不同的后綴,后綴不同所表示的功能也不同。有L4/M4/L6/M6之分,其中L表示鎖存輸出,數據只要成功接收就能一直保持對應的電平狀態,直到下次遙控數據發生變化時改變。M表示非鎖存輸出,數據腳輸出的電平是瞬時的,而且和發射端是否發射相對應,而后綴的6和4表示有幾路并行的控制通道。
當采用4路并行數據時(PT2272-M4),對應的地址編碼應該是8位,如果采用6路的并行數據時(PT2272-M6),對應的地址編碼應該是6位。本設計中由于要控制小車的前進、后退、加速、減速、左轉、右轉,因此有六個控制信號,也就需要6位地址編碼,所以本設計采用的是M6型號。
2.2.2 無線通信的工作原理
發射模塊由編碼芯片和發射電路組成,當有信號觸發時,PT2262進行編碼,然后經過315 MHz調制電路調制后,將功率放大,最后輸出編碼,其原理圖如圖3所示。
接收模塊包括接收頭和解碼芯片兩部分組成。接收頭將收到的信號輸入PT2272的14腳(DIN),PT2272再將收到的信號解碼。當接收到信號后,PT2272將其地址碼經過兩次比較核對后,VT腳輸出高電平,同時與PT2262相應的數據引腳(D0~D5)也輸出高電平。而這些數據引腳是與單片機的P1.0~P1.5引腳相連的,所以對應的單片機引腳也會輸出高電平,其原理圖如圖4所示。本文引用地址:http://www.104case.com/article/159508.htm
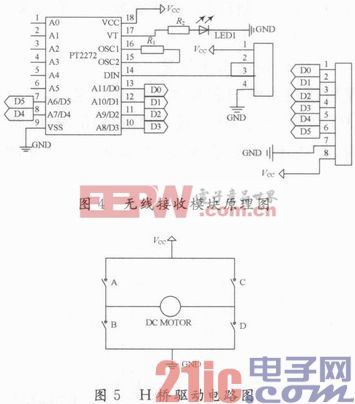
因此,當遙控器有按鍵按下,接收模塊收到信號后,單片機就可以根據接收的信號對小車進行相應的操作。[!--empirenews.p
2.3 電機驅動模塊
如圖5所示,四邊的開關與中間的電機構成一個H橋型電路,主要功能為驅動電機,可實現直流電機的正反轉,故稱為H橋驅動電路。其工作原理為:假設開關A,D接通,電機為正向轉動;當開關B,C接通時,直流電機將反向轉動。從而實現了電機的正反向驅動。若A,B,C,D同時導通或同時斷開時,直流電機將停止轉動。
電機驅動模塊采用的ST公司生產的一種高電壓、大電流L298N電機驅動芯片,內含兩個H橋電路,可驅動小車前后兩個直流電機。其中前面的電機裝上齒輪,齒輪與小車前面兩個車輪相連。當電機正轉時,帶動齒輪轉動,小車向右轉彎;當電機反轉時,小車將向左轉彎。而小車后面的電機的正、反轉,對應實現小車后退、前進的功能。其驅動電路圖如圖6所示。
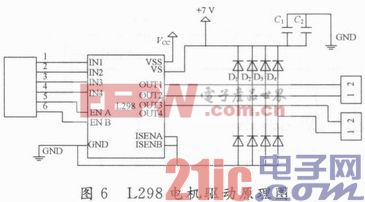
小車通過設置STC89C52輸出的PWM波的占空比控制電機的轉速來實現小車的加、減速功能。當電源電壓不變的情況下,輸出電壓的平均值取決于占空比的大小,改變占空比值也就改變了輸出電壓的平均值,從而達到控制電動機轉速的目的,即實現PWM調速。
2.4 電源模塊
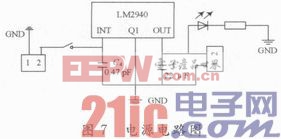
本系統采用的是7.2 V,2 A·h可充電鎳鎘電源。在小車行駛的過程中,電源電壓會有所下降,所以電源模塊需要低壓差穩壓芯片LM2940,能提供5 V的穩定電壓輸出。其電路圖如圖7所示。
3 系統軟件設計
硬件是一個系統的骨架和軀體,而軟件則是系統的思想。有了硬件而缺少軟件,系統也無法進行正常工作。所以,軟件設計對于一個系統來說也是至關重要的。
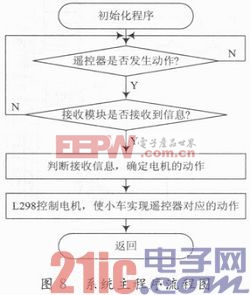
主程序是系統軟件的主框架。其具體的設計思路為:當遙控器有按鍵按下時,判斷是否接收到信號,若收到信號,則根據接收到的信號,判斷小車應當進行何種動作(包括前進、后退,左轉、右轉,加速、減速),從而控制電機驅動芯片L298,驅動對應的直流電機的正反轉,最終是實現小車與無線遙控器按下的按鍵相對應的功能。系統主程序流程圖如圖8所示。
4 結論
本課題設計的基于單片機的無線遙控小車,采用STC89C52單片機作為系統的控制核心,以編解碼芯片PT2262/PT2272作為系統的無線通信模塊,將接收到的信號傳給單片機,單片機根據接收信號控制驅動芯片L298,使其驅動電機,控制小車前進、后退,左轉、右轉,以及加速、減速。本系統具有體積小、成本低、操作簡單并且實用等優點。本課題還可以進一步進行研究,利用紅外管、激光管或者是攝像頭等傳感器,可實現小車的避障和循跡以及現場信號采集等功能。

萬能遙控器相關文章:萬能遙控器代碼



評論