無線傳感器網絡用于監測系統中的定位算法

摘要:從硬件設計入手,介紹了自主設計的以片上系統(SOC)STM32W108為核心的WSN節點,在此基礎上采用了一種基于RSSI的加權質心定位算法實現了節點的自定位。該算法將RSSI測距和質心定位算法相結合,用測得的RSSI值作為質心定位的加權因子,合理體現了不同錨節點對定位未知節點的約束力。通過測試證明,該定位方法在較少的通信開銷情況下具有較高的定位精度,且易于實現。
關鍵詞:無線傳感器網絡;接收信號強度指示;節點定位;加權質心定位
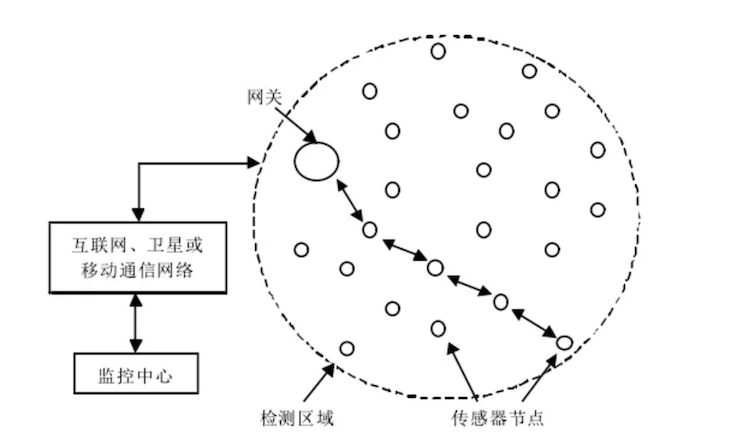
無線傳感器網絡主要用于監測系統,大多數情況下,監測到的數據必須結合實際的位置信息才有價值,這些位置信息主要包括事件發生的位置和WSN節點的位置,節點的位置是定位事件發生位置的基礎。獲取節點位置信息最直接的方法是采用人工部署或GPS定位,但是對于大規模的無線傳感器網絡,由于成本的制約和應用條件的限制,以上兩種方法實現起來都不理想。因此有必要采取相應的定位算法措施來解決目前大多數應用場合對位置信息的需求。
依據是否需要通過測量節點的距離信息把定位方法分為兩類:基于測距(rang—based)和不基于測距(rang—free)。前者是利用測量得到的距離或角度信息來進行位置計算,主要有TOA、TDOA、AOA和RSSI;后者是利用節點的連通性和多跳路由信息交換等方法來估計節點間的距離或角度,并完成位置估計,主要有DV—Hop、質心算法等。兩類定位算法各有優點,相比之下,基于距離的定位算法測量精度較高但是需要額外的硬件,不基于距離的定位算法對硬件要求較低但是定位誤差較大。本設計在自主設計的節點硬件基礎上,采用了將RSSI測距和質心定位方法結合起來,實現了節點的自定位,避免了使用單一定位方法的不足,提高了定位精度。
1 WSN節點硬件設計
1.1 節點設計方案的確定
WSN節點設汁有兩種方式:一種是NCP(network eoprocessor)——核心處理器和Zigbee網絡處理器分開,另一種是SOC(system on chip) ——使用包含無線射頻功能的核心處理器。傳統的設計大部分采用了NCP的方式,這種方式的優勢在于應用程序和Zigbee協議間可以分開設計,核心處理器的選擇很靈活,可以是8位的單片機,也可以是運行嵌入式操作系統的高級ARM,但是由于需要兩個處理器,就意味著增加了成本,且增加了節點的功耗,對于電池供電的無線傳感器網絡來說,增大了功耗就使得整的網絡的壽命減少。而SOC的方式,大大減小了功耗和成本,且隨著芯片工藝的進步,SOC內部的資源已經不再是限制其使用的瓶頸。故本設計采用了SOC的方式,選用了意法半導體最新推出的射頻SOC—STM32W108。
1.2 STM32W108簡介
STM32W108是意法半導體推出的一款WSN專SOC。該芯片采用32位ARM Cortex—M3內核,具有較強的處理能力,內部集成了符合IEEE80 2.15.4標準的2.4 GHz射頻收發器,且芯片內部帶有功率放大器,最大輸出功率可達7 dB,芯片內部同化了Zigbee 2007 Pro協議棧,用戶根據ST官網提供的API函數就可實現Zigbee網絡節點間數據的收發。
1.3 節點硬件設計
實際設計中,選用了由上海沁科公司基于STM32W108生產的Zigbee模塊——EMZ3018A,該模塊采用了類似郵票孔的焊盤,可以很方便的焊接在PCB板上。圍繞著該模塊實現了外圍電路的設計,主要包括:電源模塊、SD卡存儲模塊、藍牙模塊、接口擴展模塊,下面分別進行詳細介紹:
(1)電源模塊
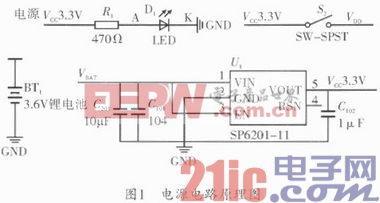
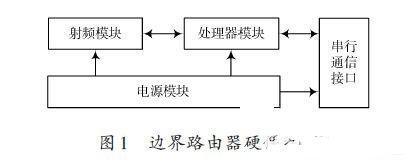
由于STM32W108的工作電壓要求是2.1~3.6 V,而SD卡和藍牙模塊要求是33 V供電,故選擇了3.3 V輸出的低壓差線性穩壓芯片SP620 1-3.3,它的輸出電流能達到200 mA,滿足節點正常工作的需要,而且僅需要300 mV的壓差,3.6 V的鋰電池即可滿足要求。電源電路如圖1所示。
(2)存儲模塊
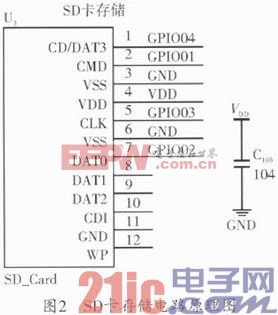
考慮到節點在后期的實際監測中需要存儲大量的數據,一般的存儲芯片容量較小且價格較高,故本設計選用了大容量的存儲設備SD卡,而且SD卡支持FAT32文件系統,存儲的數據可以直接在PC上瀆取,實際應用中方便人工現場取數。同時SD卡支持SPI接口,操作方便。電路如圖2所示。
(3)藍牙模塊
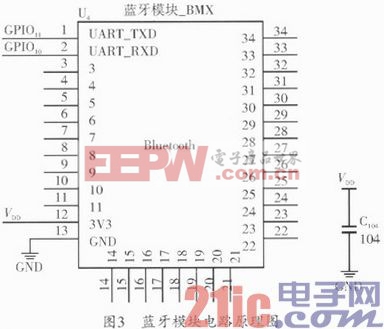
藍牙模塊只在中心節點上安裝,主要是為網關與中心節點通信服務的。本設計選用的是BMX藍牙模塊,其操作很方便,通過串口和STM32 W108連接,網關通過藍牙配對成功后即可實現和中心節點的數據透傳。藍牙模塊電路如圖3所示。
(4)接口擴展模塊
考慮到節點的體積和實際應用中的不同需求因而選用不同的傳感器,故將I2C接口、SPI接口、和STM32W108的內部12位AD的6路接口引出來,做成插針封裝。使用時,在PCB上焊接雙排插針母座,然后根據需要單獨做出傳感器板插接到節點上,即可實現大部分傳感器的采集。



評論