小型遙控轉(zhuǎn)臺(tái)系統(tǒng)設(shè)計(jì)

2.3 程序設(shè)計(jì)
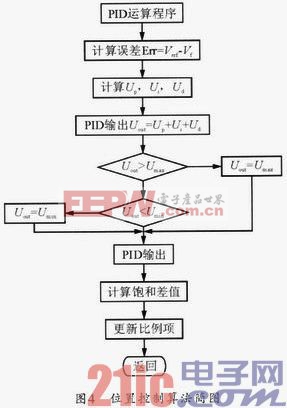
云臺(tái)驅(qū)動(dòng)執(zhí)行機(jī)構(gòu)部分的控制程序主要流程是:上電初始化nRF403后,接收旋鈕旋轉(zhuǎn)幅度和方向的譯碼指令,以30 ms為周期執(zhí)行指令掃描以及電機(jī)角度信號(hào)采集;角度數(shù)字量化后,折算為旋轉(zhuǎn)目標(biāo)角度和當(dāng)前實(shí)際角度的相對(duì)誤差;計(jì)算需要旋轉(zhuǎn)的速度;驅(qū)動(dòng)執(zhí)行PWM波可以通過(guò)內(nèi)部定時(shí)器,由I/O產(chǎn)生PWM波,載波頻率為20 kHz,不同速度對(duì)應(yīng)不同的占空比信號(hào),和另一路I/O產(chǎn)生電機(jī)旋轉(zhuǎn)的方向信號(hào),寫(xiě)成速度控制函數(shù);簡(jiǎn)易的位置閉環(huán)算法如圖4所示,實(shí)驗(yàn)證明PID調(diào)節(jié)基本可以快速和穩(wěn)定的完成攝像頭定位功能。本文引用地址:http://www.104case.com/article/159467.htm
3 操作控制器設(shè)計(jì)
3.1 硬件電路設(shè)計(jì)
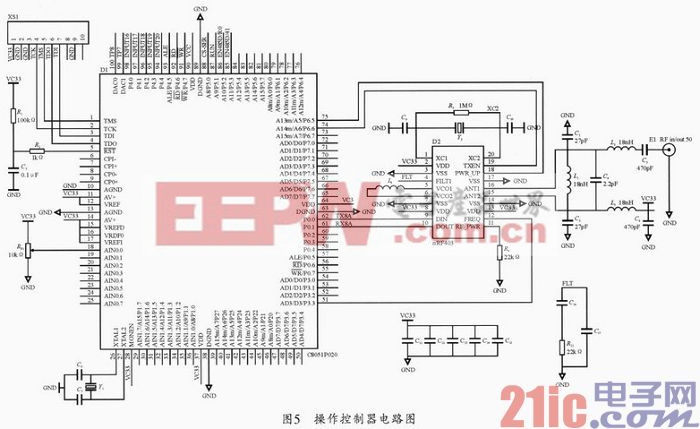
遙控操作控制端,同樣采用Silicon公司的C8051F020單片機(jī)作為微控制器,原理圖如圖5所示,旋鈕操作采集需要轉(zhuǎn)動(dòng)指令信號(hào)讀入單片機(jī)A/D接口,由端口AIN0.0的A/D采樣,轉(zhuǎn)化為轉(zhuǎn)動(dòng)幅度值,單片機(jī)掃描到該控制量后,將其編碼,以30ms周期發(fā)送數(shù)據(jù),送至nRF403模塊DOUT,這樣指令就經(jīng)過(guò)模塊nRF403無(wú)線調(diào)制發(fā)射出去。單片機(jī)P6.6端口的控制信號(hào)TXEN端口的值設(shè)置TXEN=“1”時(shí)為發(fā)射狀態(tài)。在工作過(guò)程中,C8051F020單片機(jī)的P0.0與nRF403的DIN端口相連接,P0.1與nRF403的DOUT相連接。FREQ、F_PWR和TXEN分別由C8051F020單片機(jī)的其他管腳控制。接口關(guān)系如圖5。進(jìn)行遙控操作時(shí),需要發(fā)送的數(shù)據(jù)經(jīng)過(guò)C8051F020單片機(jī)的P0.1也就是TXD端到達(dá)nRF403芯片的DIN端。協(xié)議與驅(qū)動(dòng)云臺(tái)端互為編碼解碼方式。
3.2 程序設(shè)計(jì)
遙控端的程序功能,主要是采集旋鈕旋轉(zhuǎn)幅度和方向,通過(guò)端口AIN0.0的A/D采樣,應(yīng)用系統(tǒng)自帶的A/D設(shè)置模塊,計(jì)算實(shí)時(shí)旋轉(zhuǎn)量,相對(duì)滿幅值進(jìn)行量化,滿幅值對(duì)應(yīng)鏡頭旋轉(zhuǎn)360度。通過(guò)P0.0和P0.1模擬通信數(shù)據(jù)時(shí)序,發(fā)送數(shù)據(jù)到nRF403的DIN端,經(jīng)過(guò)調(diào)制發(fā)送給驅(qū)動(dòng)執(zhí)行機(jī)構(gòu)。因此其程序主要任務(wù)是對(duì)旋鈕旋轉(zhuǎn)幅度數(shù)字量化,然后并按協(xié)議發(fā)送數(shù)據(jù),無(wú)線調(diào)制發(fā)射信號(hào)。
4 結(jié)束語(yǔ)
本文論述了搭建單片機(jī)和LMD18200的運(yùn)動(dòng)控制平臺(tái),并通過(guò)無(wú)線收發(fā)芯片nRF403完成了遙控?cái)z像機(jī)轉(zhuǎn)臺(tái)的控制功能。結(jié)果表明系統(tǒng)的快速性和穩(wěn)定性都較好,完全能滿足商用的基本要求。










評(píng)論