簡易智能電動車的設計

3 系統軟件設計
系統軟件設計采用C語言對單片機進行編程實現各項功能。
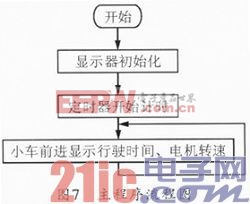
程序是在WIN XP環境下采用IAR Embedded Workbench軟件編寫。可以實現小車對傳感器的查詢,電機的控制,液晶顯示等功能。主程序流程圖如圖7所示。本文引用地址:http://www.104case.com/article/159464.htm
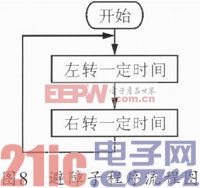
紅外探測障礙物時,當沒有感應到障礙物時紅外傳感器為單片機提供高電平,當傳感器感應到障礙物時紅外傳感器為單片機提供低電平,并產生一個下降沿提供給單片機觸發中斷,從而調用中斷子程序。當檢測到障礙物時,控制小車左轉一定時間后,再右轉一定時間,再次判斷前方是否有障礙物,直到沒有障礙物的信號。避障子程序流程如圖8所示。其它子程序包括:顯示子程序、延時子程序、路程測量子程序等。
4 系統測試
為了確定系統符合要求,我們對系統中關鍵部分進行了實際的測試。
(1)測試使用的儀器
測試中所使用的儀器儀表等設備如表2所示。

(2)指標測試和測試結果
①光電檢測部分測試
紅外發射管的電流在5~20 mA之間,電流大,發射的紅外線強,但雜散反射光分量多,不易調整,檢測誤差大;電流小,工作可靠,檢測頭相對被檢測的物體的距離范圍窄,對于寬度為5 cm的黑色條紋,電流在10 mA左有就可以了。將檢測頭對準在白紙上,適當靠近或拉開與白紙間的距離,調整電位器,使得反向器輸出為一個高電平。在用一張畫有黑白相間條紋的劃過檢測頭,用示波器觀察波形是否在高、低電平中跳變。若沒有此現象,可慢慢調整電位器,直到滿意為止。
②前輪測試
前輪驅動電路直接用穩壓可調直流電源供電,用外加信號觸發,觀看電機轉速以及測量電機兩端的電壓。電機狀態見表3所示。

由此表可看出,電機在正常行駛下不動作,在小車偏離軌道時電機發生了相應的轉動,同時電機在動作時的電流達到一定的強度,使輪子能偏轉到比較大的角度。
③系統實現的功能:躲避障礙物;自動測速。
5 結束語
本系統以MSP430單片機為核心部件,利用紅外測障并配合一套獨特的軟件算法實現了小車的方向速度控制、躲避障礙物、時間顯示等功能,最終使小車完成要求的各項任務。在系統設計中,力求硬件線路簡單,并充分發揮軟件編程方便靈活的特點,來滿足系統設計要求。因為時間有限,該系統還有許多值得改進的地方:紅外線有一定的缺陷,在光線較強的環境下輸出的高低電平不穩定,因此,可以在光電管上加上固定管以減少與外界環境的接觸。






評論