簡(jiǎn)易智能電動(dòng)車的設(shè)計(jì)

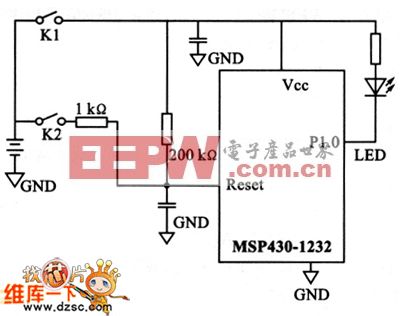
單片機(jī)MSP730F2274外接各種傳感器電路和顯示電路,其中金屬探測(cè)電路和距離測(cè)量電路是信號(hào)輸入,顯示電路是信號(hào)輸出。為了方便單片機(jī)引腳的使用,我們將單片機(jī)的所有引腳用接口引出。圖2為控制電路模塊電路圖。本文引用地址:http://www.104case.com/article/159464.htm
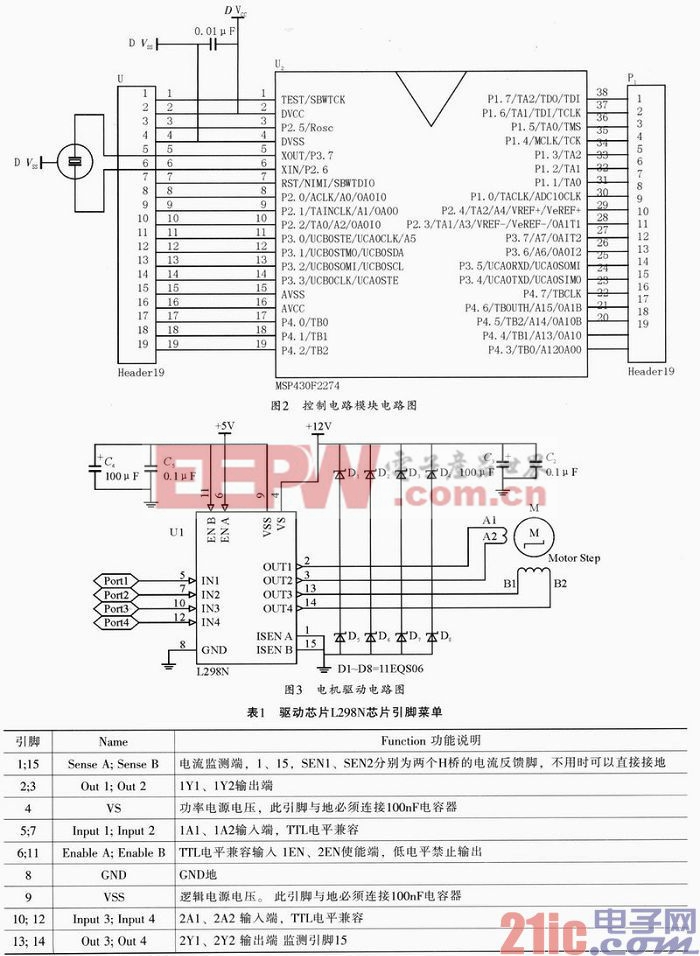
2.2 電機(jī)驅(qū)動(dòng)電路的設(shè)計(jì)
電機(jī)的驅(qū)動(dòng)芯片選用L298N。工作穩(wěn)定電機(jī)驅(qū)動(dòng)信號(hào)由單片機(jī)提供,信號(hào)經(jīng)過光耦隔離后,傳至PWM控制芯片L298N,通過L298N的輸出腳與兩個(gè)電機(jī)相連。此電機(jī)驅(qū)動(dòng)電路如圖3所示。
芯片引腳情況如表1所示,11腳為高時(shí),當(dāng)10腳電平高于12腳時(shí),13腳,14腳端電機(jī)正轉(zhuǎn);12腳電平高于10腳時(shí),電機(jī)倒轉(zhuǎn);11腳為低時(shí),電機(jī)自由控制。
2.3 顯示模塊的設(shè)計(jì)
液晶顯示模塊以其微功耗、體積小、顯示內(nèi)容豐富、模塊化以及接口電路簡(jiǎn)單等諸多優(yōu)點(diǎn)在科研、生產(chǎn)和產(chǎn)品設(shè)計(jì)等領(lǐng)域中發(fā)揮著越來越重要的作用。
本系統(tǒng)中采用液晶屏來顯示時(shí)間、路程、小車與起跑線的距離等信息。
圖4所示為液晶與MSP430F2274的連接圖。為節(jié)省I/O口,采用串口方式與單片機(jī)通信。

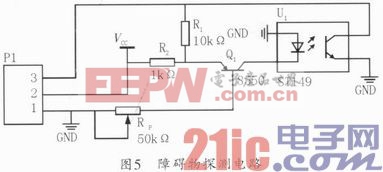
2.4 障礙物探測(cè)電路的設(shè)計(jì)
小車行駛線路中,有兩個(gè)障礙物,要求小車?yán)@過障礙物,避免與障礙物相撞。為了檢測(cè)障礙物并確定障礙物的距離,在小車的前方安置兩個(gè)紅外線發(fā)射與接收電路。圖5為障礙物探測(cè)電路。調(diào)節(jié)其電位器,可以改變紅外發(fā)射與接收的距離。將紅外檢測(cè)到的信息發(fā)送到MSP430F2 274,并通過控制電機(jī)避開障礙物。
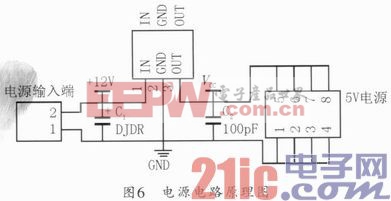
2.5 電源模塊的設(shè)計(jì)
本系統(tǒng)要求有3.3 V,5 V,9 V混合輸出可充電蓄電池電源。我們采用了一個(gè)蓄電池儲(chǔ)存電提供系統(tǒng)用電要求,所以要設(shè)計(jì)一充電電路,由于單片機(jī)MSP430F2274需要工作在3.3 V的電壓下,以達(dá)到低功耗的目的,而一些傳感器,液晶等外圍設(shè)備需要5 V與9 V的工作電壓。所以我們利用一個(gè)7805三端5 V穩(wěn)壓管、一個(gè)7812三端12 V穩(wěn)壓管和一個(gè)AMS1085CT三端3.3 V穩(wěn)壓管做為電路主要組成部分。電路原理圖如圖6所示。






評(píng)論