機場激光驅鳥器掃描系統設計及應用

摘要:介紹了機場激光驅鳥器掃描系統設計的基本內容,即系統原理、功能、特點、組成及各分系統設計;分析了系統的要求和使用條件,對直流電機選型進行計算及校核,驗證了設計的正確性和可靠性。
關鍵詞:驅鳥器;直流電機;轉矩;慣量
0 引言
近年來,隨著國內外生態環境的改善和人民保護鳥類的意識的提高,鳥類越來越多。這給世界和中國軍民用航空業卻帶來了災難。機場采取了各種各樣的驅鳥措施,并且起到了一定的效果。但現在世界范圍內還沒有一種能解決全空域、全時間段的全能手段來驅鳥。驅鳥是一個世界性難題,是一個目前亟待解決的難題。
機場激光驅鳥器掃描系統主要用以控制光線在機場允許范圍內均勻掃描,刺激恐嚇鳥類,使其不敢在機場降落、盤旋、停留,達到保護航空安全,維護乘客的財產和生命安全的目的。
1 技術指標
掃描半徑:1500m(平直跑道);
方位掃描范圍:-120°~+120°;
俯仰掃描范圍:-4°~+2°;
方位在-120°~+120°范圍內做勻速(1°/s)重復掃描;
俯仰在-4°~+2°范圍內做勻速(1°/s)重復掃描。
2 系統原理、功能、特點及組成
2.1 工作原理
系統根據上位機的設定及指令,能夠自動控制轉臺進行方位、高低轉動,能夠自動控制光線掃描范圍、光斑停留位置和停留時間,原理框圖見圖1。
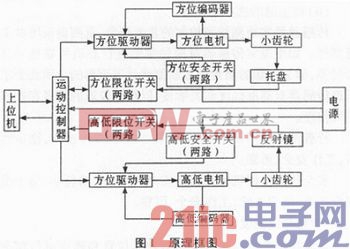
2.2 系統功能
控制機柜內部的激光器發射出激光,經擴束管擴束后向上射入反射鏡,反射鏡由轉臺帶動進行高低方位運動,反射出的激光在機場允許范圍內均勻掃描,刺激、恐嚇鳥類,使其不敢在機場停留,保護航空安全,維護乘客的財產和生命。
2.3 系統特點
(1)連續工作時間長,可靠性要求高;
(2)系統轉速低,要求低速平穩性好,回轉運動精度高;
(3)由于采用激光系統,要求該系統安全可靠性高。
2.4 系統組成
該系統由以下幾個分組成:方位伺服系統、高低伺服系統、控制系統、反射鏡系統、防護罩、回轉支撐等。系統組成見圖2。

方位伺服系統包括方位電機、方位驅動器、方位減速器、方位傳感器、回轉主軸。
高低伺服系統包括高低電機、高低驅動器、高低減速器、高低傳感器、高低軸系。
控制系統由控制器、數據運算單元、數據存儲單元、數據通訊單元、接口單元、AD/DA轉換單元、DA轉換單元、脈沖發生單元等組成。
反射鏡系統包括反射鏡和支撐。
防護罩包括上罩體和下罩體。
2.5 使用條件
工作環境:室外;
工作溫度:-10℃~+40℃;
儲存溫度:-20℃~+50℃。

霍爾傳感器相關文章:霍爾傳感器工作原理
伺服電機相關文章:伺服電機工作原理
霍爾傳感器相關文章:霍爾傳感器原理



評論