三軸加速度傳感器在智能車控制與道路識(shí)別中的應(yīng)用

2.4硬件電路設(shè)計(jì)
MMA7260Q信號(hào)采集模塊設(shè)計(jì)加速度信號(hào)采集模塊如圖1所示。x,y,z 3個(gè)相互垂直方向上的加速度由G-Gell傳感單元感知,電容值經(jīng)過容壓變換器轉(zhuǎn)換為電壓值,經(jīng)過增益放大器、濾波器和溫度補(bǔ)償以電壓的形式作為輸出信號(hào)拉J,經(jīng)過放大濾波處理,將所需模擬信號(hào)調(diào)整至一個(gè)合適的范圍,再轉(zhuǎn)換為數(shù)字信號(hào)送數(shù)據(jù)處理單元。

圖四 加速度信號(hào)采集結(jié)構(gòu)圖
加速度傳感器與單片機(jī)的接口電路MMA7260Q與MC9S12XSl28B的硬件接口電路如圖2所示。微處理器內(nèi)部包含完整的地輸入緩存器、模擬開關(guān)電路、可編程增益放大器和A/D轉(zhuǎn)換器以及數(shù)字濾波器,使用非常方便。G1,G2輸入低電平,靈敏度達(dá)到800 mV/g。。當(dāng)Mode=l時(shí),加速度傳感器處于正常工作狀態(tài)。x,y,z輸出端分別接RC濾波器,再通過高輸出驅(qū)動(dòng)運(yùn)算放大器TLV4112構(gòu)成電壓跟隨作用,輸出穩(wěn)定的直流電壓信號(hào)。
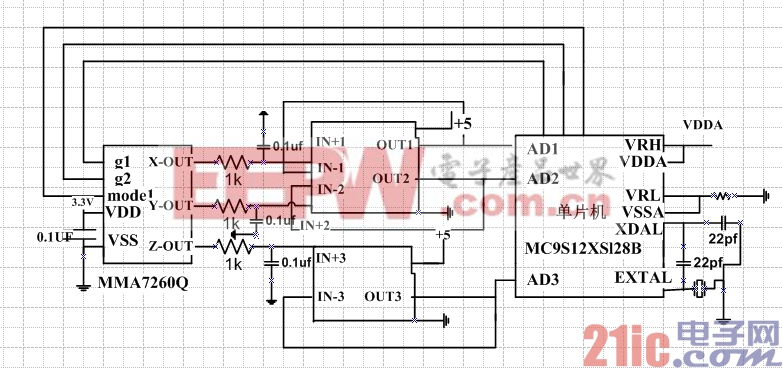
圖五 MMA7260Q與MC9S12XSl28B的硬件接口電路
2.5軟件設(shè)計(jì)實(shí)現(xiàn)
本設(shè)計(jì)采用CodeWamor軟件與BDM作為調(diào)試工具,編程環(huán)境支持c語言和匯編語言的程序設(shè)計(jì),大大方便了用戶的程序設(shè)計(jì),提高了系統(tǒng)開發(fā)效率。本設(shè)計(jì)程序代碼使用C語言編寫。
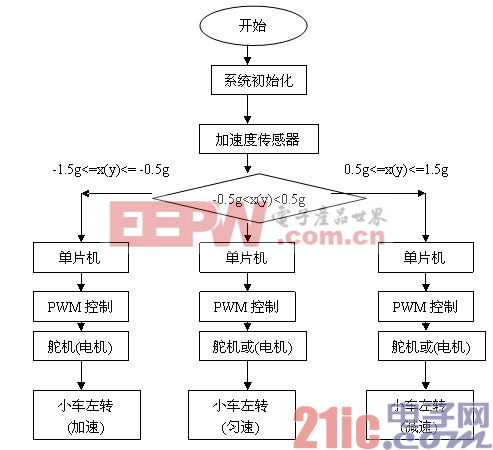
圖六 加速度程序流程圖
2.6 A/D采樣流程設(shè)計(jì)
本設(shè)計(jì)主要包括單片機(jī)初始化模塊和實(shí)時(shí)路徑檢測模塊。
1)單片機(jī)的初始化模塊包括:I/O模塊,AD模塊,定時(shí)中斷模塊初始化。
2)實(shí)時(shí)路徑檢測模塊:利用接受管,紅外光電傳感器和CCD攝像頭檢測特征信號(hào),利用加速度傳感器檢測角度信號(hào),將返回信號(hào)輸入單片機(jī)的輸入端口,程序不問斷地讀入輸入端口的信號(hào),結(jié)合判斷語句,得出合適的PWM控制信號(hào)。
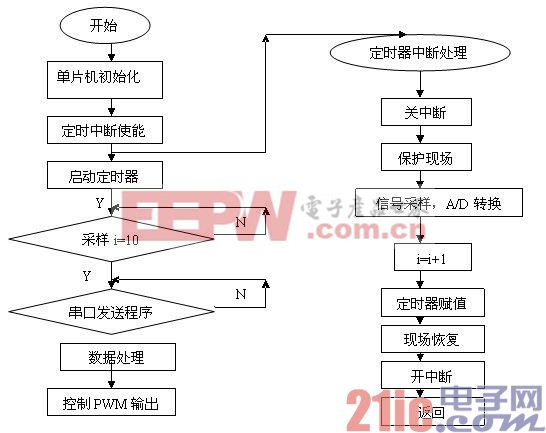
圖七 主程序與中斷程序流程圖
風(fēng)速傳感器相關(guān)文章:風(fēng)速傳感器原理











評(píng)論