一種多制式傳感器的數據融合算法

考慮到探測器各自形成的局部航跡可能發生批號交換的錯誤,導致某一探測器同一批號的航跡前后半段來自不同的目標。因此,在進行數據融合時可能出現以下兩種情況:1)兩條航跡前半段來自同一目標,而后半段來自不同目標:2)兩條航跡前半段來自不同目標,而后半段來自同一目標。如果用測量相似度均值作為測量集相似程度的度量標準,則當局部航跡發生上述第一種錯誤后,已經相關的兩條航跡不能及時分離;當局部航跡發生第二種錯誤后,航跡不能及時合并。為了解決這一問題,我們可以通過對“歷史”加以衰減,使相似度主要依靠近期的測量值來確定的方法。即
。不管x的概率是什么,只要知道了觀測誤差的概率分布就可求出該估計。
對本文討論的情況,對于同一個x存在一組探測{zi},使f{z}|x({z}|x)取得最大值的就是最大似然估計。已知任意兩次探測相互獨立,各探測分量(r,θ,φ等)也相互獨立,且服從正態分布,即有:
根據此條件可以求出f{z}|x({z}|x)和grad(Inf{z}|x)。再用梯度下降法即可求出使ln f{z}({Z})取得最大值的就是目標位置的最大似然估計值。
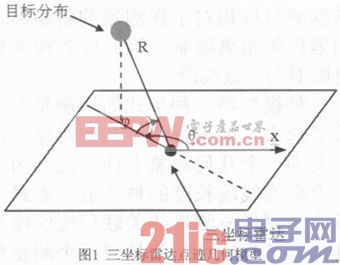
若上述測量集合{Zi}只包含一個兩坐標探測器(兩坐標雷達或紅外探測器)點跡,則采用梯度下降法只能收斂到弧線段或直線段上,而無法收斂到一點。因此上面的估計只針對測量集合{Zi}至少包含兩個探測器或包含三坐標雷達的探測系統的情況。
4 應用
在某項目研制中,應用本文所討論的融合算法,三坐標雷達探得的目標和至少兩個探測器同時探測得到的目標都能形成完整的三維融合點跡。而僅被一部兩坐標探測器探測到目標的點跡集合無法通過前面的方法變成三維點跡。處理后的整個點跡序列表現為三維融合點跡和原始的二維點跡分段交替出現。為了得到最終的融合航跡,需選用一組恰當的卡爾曼濾波器組進行切換濾波。即當存在三維點跡時用探測值形式為(x,y,z)的卡爾曼濾波器進行濾波,當遇到無三維點跡時切換為兩坐標探測器進行卡爾曼濾波,并且切換時沿用前一濾波器估計出的狀態
向量和狀態向量誤差協方差作為濾波器的起始條件,由此就成功地融合出了完整的三維航跡,同時能很好地估計出目標速度和加速度。
5 結語
本文提出的多制式傳感器數據融合算法能有效地解決多制式傳感器系統中的數據融合問題;算法簡單,易于工程實現。本文引用地址:http://www.104case.com/article/159283.htm


評論