異步電機無速度傳感器矢量控制研究

以滯后環節1/(s+ω)代替純積分環節,并引入轉子磁鏈參考值ψr*作為幅值和相位誤差的補償,從而得到一種改進的電壓型轉子磁鏈觀測模型如圖3所示。本文引用地址:http://www.104case.com/article/159276.htm
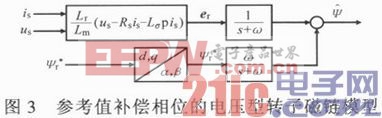
在參數準確的情況下,實際磁鏈ψr=er/s,觀測磁鏈可表示為:
![]()
式中:er為轉子產生的反電動勢,er=Lr(us-Rsis-Lσpis)/Lm。
可見,在參數準確情況下,如果ψr*=ψr,式(9)右邊第2項為零,于是有![]() ,所以改進型電壓模型可以做到無幅值和相位誤差。因此,這種改進型電壓轉子磁鏈觀測模型可以在極低速的情況下得出比較準確的轉子磁鏈觀測結果。另外,當TL取為轉子時間常數Tr時,由電機的定子電阻參數誤差帶來的磁鏈相位誤差可以在低速時降到一個很低的水平。
,所以改進型電壓模型可以做到無幅值和相位誤差。因此,這種改進型電壓轉子磁鏈觀測模型可以在極低速的情況下得出比較準確的轉子磁鏈觀測結果。另外,當TL取為轉子時間常數Tr時,由電機的定子電阻參數誤差帶來的磁鏈相位誤差可以在低速時降到一個很低的水平。
改進型電壓模型的反電勢輸入端經過的不是純積分環節,故在實際應用中沒有純積分環節的初值和漂移問題。該方法還有一個特點:當濾波時間常數ω取為與Tr相等時,觀測磁鏈的角度在零轉速附近對定子電阻的誤差有魯棒性。
4 硬件構成
雙DSP數字化開發平臺控制板以TMS320VC33作為系統的計算核心,TMS320LF2407A作為系統的控制核心,兩個DSP處理器之間通過雙口RAM
進行數據交換,并采用CPLD為程序存儲器、數據存儲器以及I/O口進行地址譯碼和讀寫控制。
5 試驗
利用試驗來驗證所提出的無速度傳感器矢量控制測速方法的正確性。其中試驗電機參數:額定功率2.2 kW,額定線電壓380V,額定電流為5 A,額定頻率為50 Hz,額定轉速為l 420 r·min-1,極對數為2,定子電阻2.54 Ω,定子漏感11.6279mH,轉子電阻1.798 Ω,轉子漏感11.627 9 mH,勵磁電阻3.91 Ω,勵磁電感235.071 8 mH。
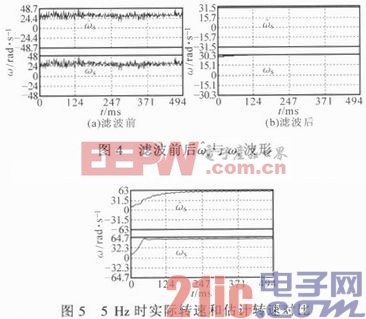
圖4為濾波前后估計同步轉速![]() 與轉速ωs波形。濾波后
與轉速ωs波形。濾波后![]() =31.423 9 rad·s-1,ωs=30.230 8 rad·s-1。轉差為1.193 1 rad·s-1。同步轉速給定為5 Hz轉換為角速度31.415 9 rad·s-1。同步轉速估計誤差為0.292 rad·s-1,相對誤差0.93%。圖5示出轉速5 Hz時實際轉速和估計轉速對比。由圖可知,在轉子頻率5Hz時,電角度為62.8rad·s-1,估計轉速誤差最大為0.68rad·s-1,相對誤差為1.08%。
=31.423 9 rad·s-1,ωs=30.230 8 rad·s-1。轉差為1.193 1 rad·s-1。同步轉速給定為5 Hz轉換為角速度31.415 9 rad·s-1。同步轉速估計誤差為0.292 rad·s-1,相對誤差0.93%。圖5示出轉速5 Hz時實際轉速和估計轉速對比。由圖可知,在轉子頻率5Hz時,電角度為62.8rad·s-1,估計轉速誤差最大為0.68rad·s-1,相對誤差為1.08%。
6 結論
采用TMS320LF2407A和TMS320VC33組成的雙DSP系統為硬件基礎,基本思想是利用改進型電壓模型,實現同積分運算等效的幅值和相位特性。電機穩態工作時,轉子反電動勢信號是正弦波形。而一個頻率為ω的理想正弦信號在經過積分環節運算后,輸出相位滯后π/2,幅值變為原來的1/ω倍。
從試驗中可知,觀測得到的磁鏈與轉子反電動勢信號在輸出相位上與通過純積分環節得到的相位仍有一點偏差,故還需要對補償環節上進行進一步研究,如何使其補償相位完全等效于積分的效果。由試驗結果可見,5 Hz時的轉速估算誤差很低,驗證了所提理論的正確性。












評論