串口通訊在變電站保護(hù)信息采集方面的問題

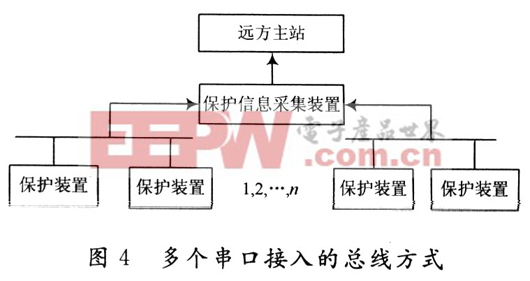
3 多個(gè)串口接入的總線方式
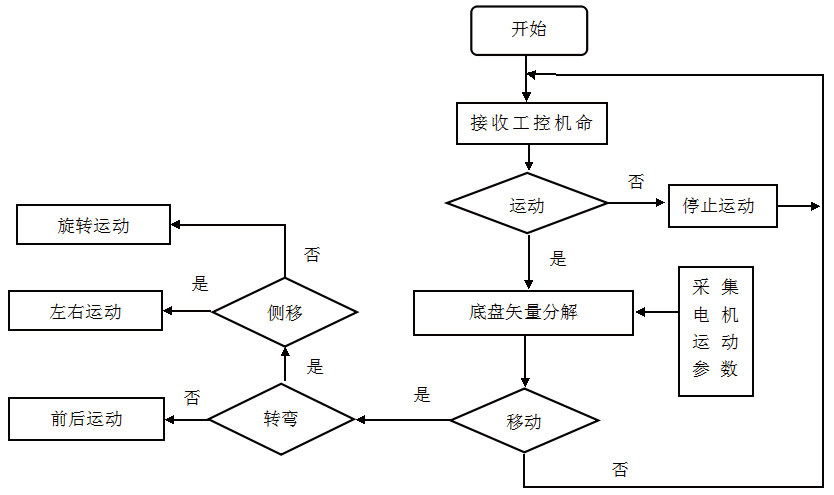
這種方式是考慮到采集裝置一般會(huì)有多個(gè)串口進(jìn)行通訊,就把保護(hù)裝置幾個(gè)一組進(jìn)行總線組網(wǎng)(考慮到實(shí)際情況一般為6個(gè)一組,也可以按現(xiàn)場(chǎng)情況決定),然后接相應(yīng)的線到采集裝置對(duì)應(yīng)的串口接入(見圖4)。
 本文引用地址:http://www.104case.com/article/158117.htm
本文引用地址:http://www.104case.com/article/158117.htm這樣的組網(wǎng)方式,采集過程和上面講的一串口接入一樣,但每個(gè)串口只管幾臺(tái)保護(hù),采用非平衡方式下,保護(hù)突發(fā)事件的反應(yīng)時(shí)間相對(duì)于這個(gè)串口一般在0.5~3 s之間,這樣從數(shù)據(jù)可靠性和實(shí)時(shí)性上考慮,作為保護(hù)故障信息系統(tǒng)可以接受的,而且在變電站實(shí)際工程中也是比較符合現(xiàn)場(chǎng)情況。
4 和SCADA系統(tǒng)的相容問題
變電站內(nèi)一般有實(shí)時(shí)監(jiān)控系統(tǒng),它的串口組網(wǎng)方式也無非是上面幾種,可能做的提高實(shí)時(shí)性和可靠性的辦法是把電信號(hào)轉(zhuǎn)換為光信號(hào)進(jìn)行傳輸,但受到保護(hù)自身傳輸和非平衡通訊規(guī)約的制約,其實(shí)時(shí)性一般沒有用以太網(wǎng)等其他通訊方式高。如今的保護(hù)如果提供2個(gè)獨(dú)立通訊口,保護(hù)故障信息系統(tǒng)和SCADA系統(tǒng)各取一個(gè)通訊口,不存在信息的相互干擾,通訊能力也是只和保護(hù)自身處理能力有關(guān)。但如果保護(hù)只提供1個(gè)通訊口(如早期的LFP系列保護(hù),只提供1個(gè)RS 232串口),則無法獨(dú)立地接人2套系統(tǒng)。為了解決這個(gè)問題,需要一個(gè)數(shù)據(jù)轉(zhuǎn)發(fā)處理裝置(如RCS 9692,用LFP通訊規(guī)約),把保護(hù)設(shè)備都先接入到這個(gè)轉(zhuǎn)發(fā)裝置中,并對(duì)其提供2個(gè)獨(dú)立的通訊口,所以組網(wǎng)方式變成如圖5所示。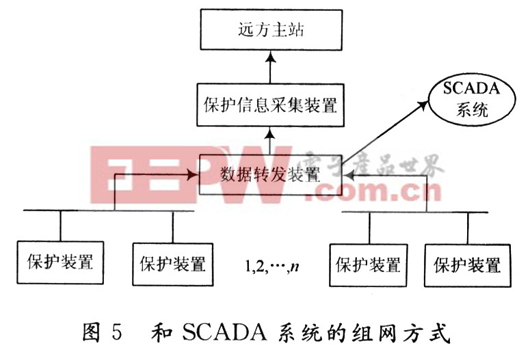
如果是這樣組網(wǎng)結(jié)構(gòu),則數(shù)據(jù)的實(shí)時(shí)性的好壞很大程序取決于這個(gè)數(shù)據(jù)轉(zhuǎn)發(fā)器,而一個(gè)透明的命令轉(zhuǎn)發(fā)器,只有1個(gè)串口接入到保護(hù)信息采集裝置,其模式就相當(dāng)于總線方式(1個(gè)串口接入),上面已經(jīng)提到這個(gè)模式下實(shí)時(shí)性會(huì)比較差(而實(shí)際在接入RCS 9692這個(gè)裝置中,它單個(gè)命令的回應(yīng)時(shí)間為1~1.5 s)。
需要注意:實(shí)際情況下,RCS 9692的2個(gè)通訊口有差別,接通訊口1,則RCS 9692有一個(gè)對(duì)下輪循機(jī)制,RCS9692自動(dòng)輪循保護(hù)并會(huì)把保護(hù)的突發(fā)信息先保存在自己的緩沖區(qū)中,當(dāng)通過通訊口1去詢問時(shí),就會(huì)把緩沖區(qū)里的數(shù)據(jù)直接回應(yīng),但通過通訊口2卻沒有這個(gè)功能,是一個(gè)透明的通訊口,而SCADA系統(tǒng)一般需要接入通訊口1。
5 結(jié) 語
正如上面這些情況所言,保護(hù)故障信息系統(tǒng)有時(shí)采集突發(fā)事件反應(yīng)較慢,因?yàn)槠渑cSCADA系統(tǒng)相容問題導(dǎo)致,其實(shí)在變電站自動(dòng)化實(shí)施過程中狀況已經(jīng)改變,現(xiàn)在越來越多的通訊采用以太網(wǎng)等方式進(jìn)行。但為了數(shù)據(jù)的可靠性,保護(hù)裝置最好能提供2個(gè)獨(dú)立的通訊口,而且最好2個(gè)通訊口都能自由選擇提供規(guī)約,這樣數(shù)據(jù)不會(huì)在通訊中相互干擾,更可提高可靠性,如1個(gè)通訊口損壞不會(huì)影響另一套系統(tǒng),保護(hù)數(shù)據(jù)還能有一定的持續(xù)性和完整性。S(2AI)A系統(tǒng)比較注重實(shí)時(shí)性,但保護(hù)故障信息系統(tǒng)卻更關(guān)心數(shù)據(jù)的完整性,比如對(duì)保護(hù)擾動(dòng)數(shù)據(jù)的采集等。如果保護(hù)只提供一個(gè)通訊口有數(shù)據(jù)服務(wù)的情況下,那么命令轉(zhuǎn)發(fā)器應(yīng)該做到數(shù)據(jù)的實(shí)時(shí)性,與2套系統(tǒng)的不相互干擾性。



評(píng)論