基于機器視覺的變電站智能機器人的研制*

*國網浙江省電力有限公司科技創新項目,項目編號:DJ105002021Y0014
本文引用地址:http://www.104case.com/article/202205/434339.htm傳統的變電站倒閘作業以及巡檢業務主要以人力運維為主,按規定通常需要2 人一組前往變電站進行倒閘操作。然而倒閘操作技術要求高,人員篩選嚴格,隨著巡檢業務量的增加,人員短缺成為共性問題。此外,多數變電站遠離市區,驅車往返通常超過兩小時,而倒閘操作通常只需要半小時左右。這使得作業效率低下,人力成本和時間成本較高。
隨著社會經濟發展,電網規模的不斷擴大,運檢業務工作量與日俱增,目前傳統的人工倒閘操作已明顯滯后于現代電網的飛速發展,亟需采用新技術轉變倒閘作業模式,減輕工作人員負擔,確保電力設備安全穩定運行。
隨著人工智能技術和機器人技術的發展,由兩者結合的變電站智能機器人應運而生。本研究工作利用基于Mean Shift 的目標跟蹤算法,通過多軸機械手、浮動操作平臺、環境監控球機、3D 視覺相機、2D 激光以及移動平臺等手段將人工運維的絕大部分操作動作集成到機器人上,操作者可以遠程監控機器人的狀態,并控制其實現遠程遙操,最大程度實現無人化變電站管理,降低人力成本,減少安全風險,提升倒閘作業效率,推動變電站智能化建設。
1 國內外變電站機器人研究現狀
1.1 國外研究現狀
國外在機器人的研究、布局上起步較早,技術優勢顯著。Katrasnik, J. 等人提出了一種基于圖像視覺的變電站巡檢機器人,通過試驗證明該方法的有效性[1]。John-Young Park 等人研發了一種新型的巡檢機器人,該機器人采用輪腿移動,因而更加小巧輕便,絕緣性更好,同時其指出使用仿生立體視覺技術將更有效地提高巡檢機器人的智能化[2]。
1.2 國內研究現狀
我國關于變電站機器人研究起步較晚。魯守銀等人于2005 年提出了一種基于移動機器人的變電站設備巡檢系統,其可以在無人值守或少人值守的變電站對室外高壓設備進行巡檢,提高變電站設備運行的安全可靠性[3]。肖鵬等人針對現有云臺無法滿足變電站現場巡檢要求這一情況,設計了巡檢機器人云臺控制系統,該系統可以實現精準定位和控制,能夠滿足巡檢任務的要求[4]。
國家電網公司也成立了電力機器人重點實驗室,圍繞變電站巡檢機器人、高壓帶電作業機器人以及電力特種機器人進行了一系列的研究。國網山東省電力有限公司電力科學研究院和山東魯能智能技術有限公司于1999 年最早開始研究變電站巡檢機器人,并2004 年成功研制第一臺功能樣機[5]。2012 年12 月,重慶市電力公司和重慶大學聯合研制的變電站巡檢機器人在巴南500 kV 變電站成功試運行[6],可實現遠程監控及自主運行。2014 年1 月,浙江國自機器人技術有限公司研制的變電站巡檢機器人在瑞安變電站投運。各類變電站巡檢機器人已在各省市電網公司中得到推廣應用。
2 機器人視覺定位方法
2.1 基于Mean Shift的目標跟蹤算法
Mean Shift 算法[7]是一種核密度估計算法,這種算法屬于無參數估計算法,其不需要事先知道樣本的概率密度分布函數,完全依靠訓練數據來進行估計。Mean Shift 算法采用核函數估計法,對數據進行了平滑。它在采樣充分的情況下,一定會收斂,即可對服從任意分布的數據進行密度估計。
Mean Shift 算法的本質是一個迭代的過程,其先算出當前點的偏移均值(Mean Shift),然后移動到該點的偏移均值上,依次為新的起始點,繼續移動,不斷迭代,直至滿足一定的條件為止。
給定d維空間Rd的n個樣本點xi,i=1,…,n,在空間中的一個點x,其Mean Shift 向量的定義為:

其中,Sh是一個半徑為h的高維球區域,滿足以下關系的y點的集合:

k表示在這n個樣本點中,有k個落入Sh區域。
公式(2-1)表示把落在以半徑為h的高維球區域中的所有點和圓心產生的向量相加,最終得到的結果就是MeanShift 向量。然后再以MeanShift向量的終點為圓心,形成一個高維球區域,重復上述操作,最終Mean Shift算法可以收斂到概率密度最大的地方。
將Mean Shift算法理念應用于運動跟蹤中,首先得到跟蹤目標視頻畫面中HSV 空間中H 通道的分布直方圖,然后在下一視頻幀中找到與這個特征相近的區域,而相似度的衡量就是使用相似函數,相似函數值越大代表所選區域與跟蹤目標越相似。Mean Shift 算法就可以使搜索窗口不斷向兩個模型相比顏色變化最大的方向移動,最終找到當前幀的位置,并以此作為下一幀的起始搜索窗口中心,不斷迭代,每兩幀之間都會產生一個Mean Shift 向量,整個過程產生的Mean Shift 向量首尾相連就形成了目標移動軌跡。
由公式(2-1)看出,所有落入Sh區域的點的權重是一樣的。但是在現實跟蹤過程中,跟蹤目標出現遮擋等影響時,外層的像素值更容易受到影響,跟蹤目標中心附近的像素比外側的更重要。因此,不同采樣點的權重應是不同的,故而引入核函數和權重系數來區分不同樣本對模型的影響程度,從而提高跟蹤算法的魯棒性,增強算法的搜索跟蹤能力。本文使用的核函數為Epannechnikov 核函數:

Mean Shift 算法具體實現步驟如下:
(1)計算目標模板的概率密度{qu }u=1,2,…,m,目標被估計位置y0與核窗寬h;
(2)用初始化當前幀的位置,計算候選目標模板{pu (y0 )}u=1,2,…,m;
(3)采用Bhattacharyya系數作為相似性函數計算當前窗口內個點的權重值:

(4)計算新目標的位置:

3 機器人系統架構設計
3.1 系統整體架構
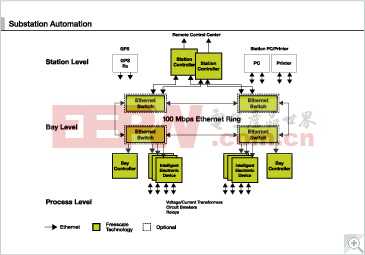
本文實現的變電站智能機器人的系統整體架構如圖1所示。其包含機器人本體和集控中心& 工區服務器兩部分。機器人本體和集控中心& 工區服務器通過無線和有線網絡建立連接。用戶通過集控中心& 工區提供的用戶界面遠程查看站所環境和機器人狀態數據,下發巡檢和操作指令,而機器人本體接收到巡檢和操作指令后執行相應的柜體狀態識別或者倒閘目標操作。

3.2 機器人本體架構
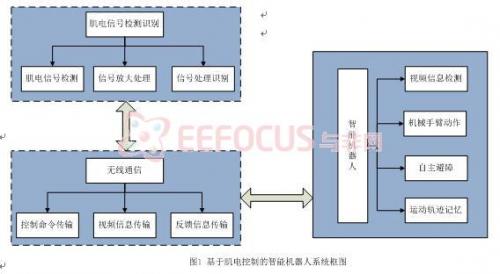
機器人本體是巡檢和操作功能的執行主體,主要由ROS 節點、核心服務、文件服務、數據庫服務和實時視頻服務構成,如圖2所示。
ROS 節點是本體功能實現的核心載體,其通過網口和本體各硬件進行交互,實現姿態控制和狀態獲取。
核心服務是本體控制和管理的總入口,提供狀態查詢、數據管理、告警顯示、獨立的巡檢和操作任務下發等功能。同時它也是本體和集控中心& 工區之間交互的橋梁,實現信令和數據的上傳和下發。
數據庫服務為ROS 節點和核心服務提供狀態和任務數據的存儲和訪問功能。
文件服務存儲ROS 節點在巡檢和操作中生成的結果,并經網絡將其上傳到工區的文件服務器。
實時視頻服務對本體搭載的多路監控視頻進行全景拼接,便于用戶實時監控機器人狀態,輔助用戶進行操作確認和決策。

3.3 集控中心&工區架構
集控中心& 工區對分布在各站所的機器人進行統一管理和控制,包括視頻服務器、工區數據庫、工區文件服務器和集控& 工區服務,如圖3 所示。

視頻服務器為機器人本體監控球機及站所監控球機提供視頻存儲、查詢和回放等功能,并提供外置監控球機視角下的機器人位置定位功能。
工區數據庫存儲各站所機器人的狀態和任務數據。
工區文件服務器存儲各站所機器人上傳的結果圖片、操作日志等文件。
集控& 工區服務提供用戶界面,實現所有接入站所的統一管理、查詢和控制。
4 機器人硬件設計與功能實現
4.1 系統整體架構
智能機器人的硬件主要由三部分構成:位于頂部的機械臂,位于中間的手車地刀浮動平臺和位于底部的底盤,如圖4 所示。


圖4 智能機器人原型及實物
機械臂末端安裝操作手爪,實現對旋鈕、按鈕、鑰匙、緊急分合閘保護裝置等目標的操作,同時,機械臂末端也搭載可見光相機、紅外相機和局放檢測傳感器,通過機械臂末端的升降、水平旋轉和垂直俯仰來模擬云臺動作。
手車地刀浮動平臺實現手車和地刀的操作,通過前后兩個軸上的位移實現水平和垂直方向的角度微調。底盤主要由電池、驅動輪、動力系統、激光雷達及工控機等構成,主要用于承載上部執行機構,及行走導航定位。
4.2 機器人功能實現
本文實現的智能機器人主要應用于220 kV、110 kV電壓等級變電站以及10 kV 開關室中的智能電氣設備巡檢任務執行、開關柜倒閘操作、突發情況下的緊急分閘操作等功能,全業務操作均可通過控制平臺完成。圖5展示了智能機器人實際執行倒閘操作的狀態。智能機器人在獲取運維人員下達的工作指令后,通過定位系統精準停在指定的電力控制開關柜前,機械臂前端夾住開關柜面上的控制旋鈕,按照預先的指令,將“遠方”切換至“就地”,完成倒閘操作后將執行結果反饋給集控中心。
以往倒閘操作往往需要兩位運維人員趕赴現場,而現在運維人員無需到達現場,通過集中控制平臺下發操作指令,實時監控機器人運行情況,等待機器人反饋執行結果,即可完成全部巡檢工作。經統計,單間隔運行改到線路檢修或者從線路檢修改到運行的整個操作流程,機器人總耗時低至13 分鐘。

圖5 智能機器人倒閘操作
5 結論
本文開發研制了基于立體視覺的智能巡檢機器人,實現了遠程智能巡檢、遠程開關柜倒閘操作以及突發情況緊急分閘等功能,大幅度提高了變電站巡檢安全性和效率,提升設備狀態管控能力,推動建設智慧變電站,保障電網運行可靠性。
參考文獻:
[1] KATRASNIK J,PERMUS F,LIKAR B. A Survey of Mobile Robots for Distribution Power Line Inspection[J]. IEEE Transactions on Power Delivery, 2010, 25(1):485-493.
[2] PARK J Y,LEE J K,CHO B H,et al. An Inspection Robot for Live-Line Suspension Insulator Strings in 345-kV Power Lines[J].IEEE Transactions on Power Delivery,2012,27(2):632-639.
[3] 魯守銀,錢慶林,張斌,等.變電站設備巡檢機器人的研制[J].電力系統自動化,2006,30(013):94-98.
[4] 肖鵬,王海鵬,曹雷,等. 變電站智能巡檢機器人云臺控制系統設計[J]. 制造業自動化,2012, 34(001):105-108.
[5] 楊旭東,黃玉柱,李繼剛,等.變電站巡檢機器人研究現狀綜述[J].山東電力技術, 2015, 42(001):30-34.
[6] 佚名.重慶超高壓500kV變電站巡檢機器人通過評審[J].廣西電力建設科技信息, 2008(2):17-17.
[7] COMANICIU D,Meer P.Mean shift: a robust approach toward feature space analysis[J].IEEE Trans Pattern Analysis & Machine Intelligence, 2002,24(5):603-619.
(本文來源于《電子產品世界》雜志2022年5月期)

評論