CPLD在射頻卡讀寫器中的應用

1 系統工作原理和CPLD特性
本文引用地址:http://www.104case.com/article/157983.htm射頻卡讀寫系統又稱射頻識別系統(Radio Frequency Identification),它是利用無線方式進行非接觸式雙向數據通信,進而達到識別目標并交換信息的目的。射頻識別技術發展迅速,在門禁、交通這、防盜、金融、身份證管理、工業自動化等方面有著廣泛的應用前景。按照相關標準,非接觸IC卡可以分為3種:(1)密耦合卡(ISO10536),作用距離0~1cm。(2)近耦合卡(ISO 14443),作用距離0~10cm。(3)疏耦合卡(ISO 15693),作用距離0~150cm[1]。
基于ISO 15693協議標準設計的射頻卡讀寫器是目前中低頻段工作距離最遠(達1.5米)的射頻識別裝置。射頻卡由半導體廠商提供,目前國內外均有符合該標準的商用化射頻卡。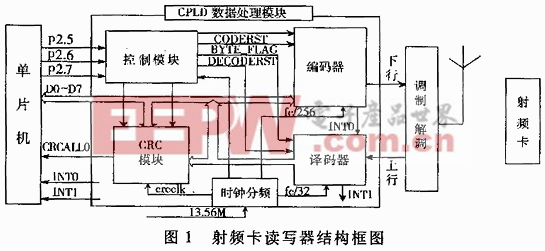
在實際應用中,密耦合卡和近耦合卡距離射頻卡讀寫器作用距離特別小,一般每次只要求響應一張卡(如公交售票系統)。而疏耦合卡往往應用在對多卡同時進行響應的場合(如多個持卡行李同時經過門檢),讀寫器與多卡同時進行數據交換可以通過軟件設計加入“防碰撞機制”實現。但是由于讀寫器在響應某張卡時的數據交換時間被限制在200μs~300μs內,選用普通單片機無法達到這一要求,因此在設計中選用了高速CPLD器件來實現編碼、解碼以及差錯控制功能。一方面在響應時間上滿足了實際應用的需要;另一方面簡化了軟件設計。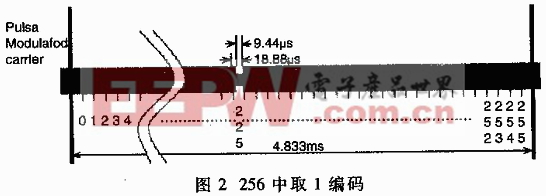
2 功能模塊實現
2.1 編碼器與譯碼器
單片機啟動編碼后,編碼模塊向單片機發中斷(INT0)獲取待編碼的指令數據,同時將指令數據送入并行CRC模塊。當指令數據完成編碼后,控制電路將2字節 CRC值緊接在數據之后進行編碼。譯碼時,譯碼器檢測到起始位后,開始譯碼。譯碼后的數據通過中斷(INT1)通知單片機取走。并同時送入CRC并行運算模塊進行校驗,單片機在特定的時刻(接收完最后一字節數據時)讀取CRC校驗標志端口CRCALL0,判斷整個數據串的正確性。
(1)數據編碼從讀寫器到卡的數據采用脈沖位置調制即“1/256”編碼。用256個時隙表示8bit數據,通過控制bit脈沖出現的時間位置來表示0~255范圍內的數據。如圖2,在第255個位置出現的位置脈沖(9.44μs高電平的9.44μs低電平)表示數據E1(HEX),采用計數器加控制電路即可實現。控制部分協助實現數據無縫編碼及形成幀起始位和結束位,用VHDL設計易于實現。編碼后的數據進行ASK調制(13.56MHz載波),經天線發射出去。
(2)數據譯碼從射頻卡返回的數據經過一次解調(去掉13.56MHz載波)后,數據編碼格式如圖3所示。可以直接進行數據譯碼,也可以去除子載波(423.75kHz)后得到Manchester碼再譯碼。這里采用后者,通過在每一bit的前、后半段時間內兩次取樣、判決、加以串并變換即可得到譯碼后的并行數據并送至并行CRC模塊進行CRC校驗,同時送往單片機處理,行CRC模塊在校驗結束時通知單片機取校驗結果。
2.2 差錯處理模塊
與射頻卡內部電路配合,讀寫器端采用了常用的CRC檢錯得傳機制。為了縮短處理時間,滿足讀寫器在實際應用中對多張卡同時處理時的響應時間要求,設計采用硬件實現。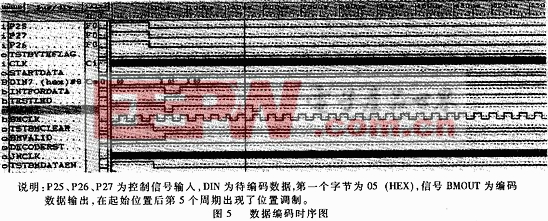











評論