基于CAN總線智能建筑監控系統的通信協議設計

摘要:從研究CAN2.OB總線規范入手,介紹了CAN總線規范的硬件基礎,分析了CAN總線報文格式,通過對報文標識符的分配,設計了應用于該系統的通信協議,并給出了軟件設計流程,較好地解決了智能建筑監控系統通信過程中的仲裁問題。
關鍵詞:智能建筑;CAN總線;通信協議;標識符
現代智能建筑監控系統廣泛采用了現場總線技術。現場總線的種類目前有40多種,但適合智能建筑且在我國推廣的主要有兩種:CAN(Control Area Network)總線和Lonworks總線。CAN總線技術以其可靠性高,結構簡單,傳輸距離長和成本低而具有巨大的應用潛力。
控制局域網CAN是現場總線技術中最成熟、最有發展前途的微處理器局域網絡。協議采用總線型拓撲結構,通過研究CAN2.0B協議規范,制定了符合智能建筑監控系統的通信協議,并進行了通信節點軟件的設計。
1 基于CAN總線的智能建筑網絡拓撲結構
CAN總線的智能建筑監控系統拓撲結構,如圖1所示。該系統由3部分組成:上位機、CAN通信節點和各個現場智能設備組成。通信節點的數量可根據建筑物的規模增減,CAN總線作為通信網絡將各個節點連接成一個分布式智能監控系統。
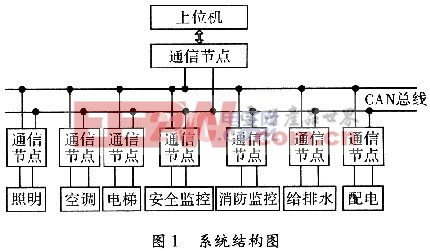
(1)上位機:由計算機和監控軟件組成,對整個智能建筑監控系統的管理和控制,是整個系統的中心。
(2)CAN通信節點:各通信節點功能相同,主要完成把現場設備采集到的實時數據發送到CAN總線上,接收CAN總線發送來的控制信息。CAN通信節點的硬件由微處理器、CAN控制器SJAl000、CAN收發器PCA82C250組成。
(3)現場智能設備:由微處理器、和現場功能裝置等組成。完成檢測、報警、控制、顯示等功能。智能建筑監控系統現場設備由照明、空調、電梯、安全監控、消防監控、給排水,配電等組成。
2 CAN總線通信協議的硬件基礎
CAN總線協議描述了信息在設備之間的傳遞規則,它對層的定義與開放系統互連模型OSI一致,CAN被分為應用層、數據鏈路層和物理層3層,各層之間互相透明,每一層只與另一設備上相同的那一層通訊,實際的通訊是發生在每一設備上相鄰的兩層之間,而各個設備只通過物理層的通信介質連接在一起。
CAN總線規范定義了模型的最下面的兩層:物理層和數據鏈路層。CAN總線驅動器和通信介質則實現了物理層的主要功能。CAN總線控制器實現了總線協議中規定的數據鏈路層的傳輸任務。常用的CAN總線驅動器有Philips公司的PCA82C250,總線控制器是SJAl000,通信介質是雙絞線或同軸電纜。
2.1 總線驅動器PCA82C250的工作原理
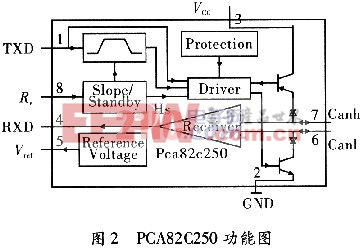
PCA82C250是CAN總線控制器與物理導線之間的接口,該驅動器可以提供對總線的差動發送和接收功能。PCA82C250的驅動部分由1個PNP的極管和1個NPN的三極管組成。這2個三極管根據TXD的信號導通或截止。當TXD=0時,2個三極管處于導通狀態時,總線上顯示為顯性電平。當TXD=1時,2個三極管處于截止狀態,總線上顯示為隱性電平,此時驅動器對總線的影響很小。因此,如果存在其他節點發送顯性電平,則總線的電平狀態就是顯性,只有所有的驅動器都發送隱性電平,總線的電平狀態才是隱性。實現了CAN總線物理層的線與功能。PCA82C250功能圖,如圖2所示。






評論