基于ZigBee的現(xiàn)場(chǎng)安全溫度在線監(jiān)控系統(tǒng)

3.4 應(yīng)用程序的設(shè)計(jì)
無(wú)線傳感器網(wǎng)絡(luò)一般需要解決數(shù)據(jù)碰撞及網(wǎng)絡(luò)地址分配等問(wèn)題,這樣才能使整個(gè)ZigBee網(wǎng)絡(luò)穩(wěn)定工作,數(shù)據(jù)信息準(zhǔn)確傳輸。特別是以ZC為終點(diǎn)的無(wú)線通信,很可能因在同一時(shí)間內(nèi)接收多個(gè)ZR或ZED的數(shù)據(jù)而造成數(shù)據(jù)丟幀。為了使數(shù)據(jù)信息準(zhǔn)確無(wú)丟失地在ZC、ZR和ZED之間相互傳輸,系統(tǒng)采用了“時(shí)間片輪轉(zhuǎn)法”使各ZigBee設(shè)備分時(shí)發(fā)送數(shù)據(jù)。整個(gè)網(wǎng)絡(luò)中共有11個(gè)ZigBee設(shè)備,其中ZC除了短暫的發(fā)送監(jiān)控命令外,大部分時(shí)間是接收4個(gè)ZR轉(zhuǎn)發(fā)的LQI值和來(lái)自6個(gè)ZED的溫度采集數(shù)據(jù)。系統(tǒng)設(shè)定1 s為整個(gè)網(wǎng)絡(luò)的工作周期,期間ZC需接收來(lái)自ZR和ZED共10個(gè)設(shè)備的數(shù)據(jù)來(lái)實(shí)現(xiàn)溫度監(jiān)控與空間定位的功能。因此,每個(gè)ZR或ZED各有100 ms的發(fā)送時(shí)間,均須在預(yù)定的100 ms內(nèi)完成數(shù)據(jù)成功發(fā)送任務(wù)。
網(wǎng)絡(luò)地址的分配一般以通信便捷和節(jié)省字節(jié)開(kāi)銷為佳。在溫度監(jiān)控的Star網(wǎng)絡(luò)中,ZC須同時(shí)能夠與6個(gè)ZED的任意一個(gè)或多個(gè)進(jìn)行雙向通信;而在空間定位的Mesh網(wǎng)絡(luò)中,ZC采取主動(dòng)的廣播通信方式向各ZR發(fā)送提取LQI命令,隨后4個(gè)ZR輪流在各自的100 ms內(nèi)完成發(fā)送LQI的工作。針對(duì)這種情況,系統(tǒng)采用了以1個(gè)char(8位)類型的字節(jié)來(lái)制定網(wǎng)絡(luò)中各設(shè)備的地址:由于各ZED需可同時(shí)工作,故用Bit0~Bit5分別對(duì)應(yīng)ZEDl~ZED6;而4個(gè)ZR是輪流在各自100 ms內(nèi)工作,所以采取Bit6、Bit7兩位的組合0O、01、10及11來(lái)對(duì)應(yīng)ZRl~ZR4。
3.5 上位機(jī)VB程序的設(shè)計(jì)
系統(tǒng)利用MCl3213的兩組SCI接口分別設(shè)計(jì)了經(jīng)SP3220E轉(zhuǎn)換的RS-232真實(shí)串口和經(jīng)FT232BL轉(zhuǎn)換的虛擬串口(此時(shí)已不是真實(shí)意義上的USB接口了),所以兩者都需以RS-232串口通信協(xié)議與PC上位機(jī)程序進(jìn)行雙向通信。具體實(shí)現(xiàn)功能如下:
①時(shí)間同步功能。使用Timer控件來(lái)給系統(tǒng)運(yùn)行提供時(shí)間刻度,以便記錄事件發(fā)生的實(shí)時(shí)時(shí)間。在監(jiān)控軟件上,既可選擇PC機(jī)的時(shí)間,也可自主設(shè)定起始運(yùn)行時(shí)間。
②空間定位功能。主要是基于定位公式編寫程序,使各ZED的空間坐標(biāo)能夠?qū)崟r(shí)地在上位機(jī)監(jiān)控界面上顯示。
③溫度監(jiān)控功能。實(shí)現(xiàn)ZED的溫度信息傳送至ZC,被上位機(jī)提取與運(yùn)算并在監(jiān)控界面上顯示;同時(shí),通過(guò)監(jiān)控軟件配置各類控制參數(shù),并反向發(fā)送給ZED。
④事件發(fā)生的信息記錄功能。為了保存溫度事件發(fā)生的現(xiàn)場(chǎng)信息,監(jiān)控軟件利用了CommonDiatog控件將相關(guān)信息寫入一個(gè)txt文件中,并能自主選擇tXt保存的目錄。本文引用地址:http://www.104case.com/article/157108.htm
4 實(shí)驗(yàn)數(shù)據(jù)分析及總結(jié)
為了驗(yàn)證性能及參數(shù)指標(biāo),選擇了一棟58 m×26 m×23.5 m的生產(chǎn)廠房作為實(shí)驗(yàn)基地,將4個(gè)ZR分別放置在A(55,O,O)、B(0,25,O)、C(O,O,20)及D(O,0,O)從而建立空間坐標(biāo)系,而將6個(gè)ZED移動(dòng)地分別放在各個(gè)車間里進(jìn)行測(cè)試采集數(shù)據(jù)。
4.1 溫度監(jiān)測(cè)
為了驗(yàn)證溫度監(jiān)控的準(zhǔn)確性及有效精度,在相應(yīng)車間內(nèi)放置了一個(gè)精度為O.1℃的工業(yè)溫度計(jì),測(cè)量到的實(shí)際溫度來(lái)作為ZED測(cè)溫的參考。測(cè)量溫度和實(shí)際溫度的比較如表2所列。
由表2可知:溫度監(jiān)控系統(tǒng)誤差小、精度高,最大絕對(duì)誤差為+O.175℃,最大相對(duì)誤差為O.738%,符合現(xiàn)場(chǎng)安全溫度監(jiān)控的要求。
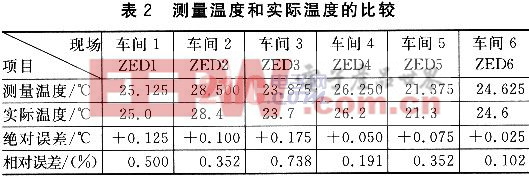
表2的溫度絕對(duì)誤差都是正數(shù),說(shuō)明測(cè)量溫度均偏高。其主要原因是,LM75A是焊接在PCB板上的,芯片要正常工作就需消耗電能,內(nèi)部產(chǎn)生的熱量難以散失;同時(shí),板上元器件布局不合理,使得其他器件產(chǎn)生的熱量也傳向LM75A,所以實(shí)測(cè)溫度比現(xiàn)場(chǎng)室溫偏高。
4.2 空間定位
在監(jiān)控軟件上獲得的各ZED坐標(biāo)位置數(shù)據(jù)的同時(shí),利用皮尺等工具測(cè)量對(duì)應(yīng)的坐標(biāo)長(zhǎng)度作為空問(wèn)定位的對(duì)比。空間定位與實(shí)際位置的關(guān)系如圖6所示。
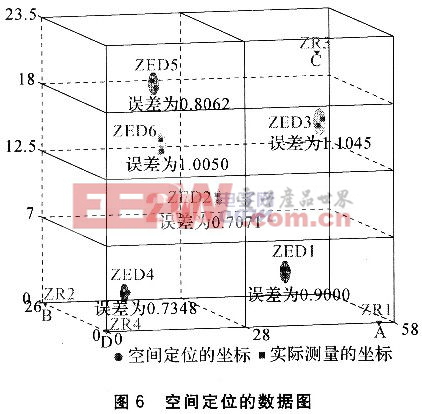
可見(jiàn),空間定位的誤差較小,最大的定位誤差為ZED3的1.1045m,在工程的允許范圍內(nèi),達(dá)到了系統(tǒng)對(duì)溫度事件的定位目標(biāo)。利用LQI進(jìn)行空間定位,從本質(zhì)上講是基于能量法的。圖5的LQI-d曲線數(shù)據(jù)是在戶外理想狀態(tài)下測(cè)得的,而生產(chǎn)現(xiàn)場(chǎng)環(huán)境惡劣,無(wú)線通信常受到障礙物影響,因此難免有所誤差。另外,由于RF收發(fā)天線不是嚴(yán)格意義上的全向,因此在相同距離而位于不同方向時(shí)所接收的LQI值也有所差別。
結(jié)語(yǔ)
本文設(shè)計(jì)了基于ZigBee的生產(chǎn)現(xiàn)場(chǎng)安全溫度在線監(jiān)控系統(tǒng),提出了三要素(溫度監(jiān)測(cè)、時(shí)間記錄及空間定位)全方位設(shè)計(jì)理念,介紹了系統(tǒng)的硬件、軟件及上位機(jī)監(jiān)控程序的設(shè)計(jì)方法。測(cè)試表明,該監(jiān)控系統(tǒng)具有精度高、功能完善、運(yùn)行穩(wěn)定及性價(jià)比高等優(yōu)點(diǎn),有一定的實(shí)用價(jià)值。若將本系統(tǒng)的RS-232/USB進(jìn)一步擴(kuò)展到GPRS或Internet,并與生產(chǎn)現(xiàn)場(chǎng)總控制室相連,則系統(tǒng)的功能和使用范圍都將得到很大的拓寬。







評(píng)論