基于FPGA的RFID無線通信系統(tǒng)的實現(xiàn)

SPI總線模式的數(shù)據(jù)是以字節(jié)為單位進(jìn)行傳輸?shù)?一次傳輸可以傳多個字節(jié)),每字節(jié)為8位,每個命令或者數(shù)據(jù)塊都是字節(jié)對齊的(8個時鐘的整數(shù)倍)。數(shù)據(jù)按位傳輸,高位在前,地位在后,為全雙工通信,數(shù)據(jù)傳輸速度總體來說比I2C總線要快,速度可達(dá)到每秒幾兆比特。SPI接口是以主從方式工作的,這種模式通常有一個主器件和一個或多個從器件。在本文設(shè)計的無線通信系統(tǒng)中,由FPGA實現(xiàn)的SPI總線接口模塊為主機,NRF905的SPI模塊為從機。
SPI時序模式的選擇:
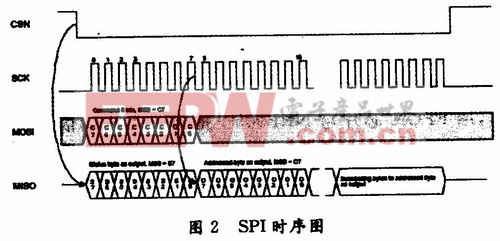
SPI接口有4種不同的數(shù)據(jù)傳輸時序,取CPOL和CPHL這兩位的組合。CPOL是用來決定SCK時鐘信號空閑時的電平;CPOL=O,空閑電平為低電平,CPOL=1時,空閑電平為高電平。CPHA是用來決定采樣時刻的,CPHA=0,在每個周期的第一個時鐘沿采樣;CPHA=1,在每個周期的第二個時鐘沿采樣。
圖2為NRF905的SPI接口的時序圖,由此本文設(shè)計的SPI工作模式是在CPOL=O,CPHA=O這種時序下。本文引用地址:http://www.104case.com/article/156991.htm
1.3.2 SPI硬件設(shè)計
圖3是本文無線通信系統(tǒng)中SPI模塊的結(jié)構(gòu)圖,該系統(tǒng)中的SPI主要由時鐘生成模塊,SPI寄存器組,SPI功能配置的模塊組成,并且通過Wishbone總線與控制器相連,具體設(shè)計如下:
時鐘生成模塊:由于SPI模塊是基于FPGA來實現(xiàn)的,而FPGA外部提供的時鐘較快(50 MHz或100 MHz),不適合與NRF905的SPI接口進(jìn)行通信
(1 Hz~10 MHz),所以需要分頻來使時鐘慢下來。但是至于幾分頻是由SPI功能配置模塊來完成的。其次由于SPI協(xié)議指出數(shù)據(jù)可在上升沿或下降沿觸發(fā),所以還需要對時鐘的上升沿或下降沿進(jìn)行鑒別(也稱抓沿程序),這個功能也由這個模塊完成。

SPI寄存器模塊:這個模塊實現(xiàn)的是一個由16個8位寄存器組成的128位的寄存器組,也就是說通過SPI接口一次性可收發(fā)8~128位的串行數(shù)據(jù)。具體操作由SPI功能配置模塊來完成。
SPI功能配置模塊:這個模塊相當(dāng)于一個SPI控制器,通過對其寄存器的配置來決定時鐘的分頻數(shù),收發(fā)數(shù)據(jù)位數(shù),時鐘上升沿或下降沿傳輸數(shù)據(jù)等,而對這些寄存器的配置是由控制模塊完成的。下面就配置寄存器做一些簡要說明。
首先介紹控制寄存器:
控制寄存器第O位go:是否開始發(fā)送。
控制寄存器第1位rx_negedge:接收數(shù)據(jù)是下降沿還是上升沿。
控制寄存器第2位tx_negedge:發(fā)送數(shù)據(jù)是下降沿還是上升沿。
控制寄存器第3~9位char_len:發(fā)送數(shù)據(jù)的位數(shù)(因為SPI是全雙工的,所以這實際上也是接收數(shù)據(jù)的位數(shù))。
控制寄存器第10位lsb:是從高位發(fā)送還是地位發(fā)送。
控制寄存器第11位ie:讀寫完成之后是否發(fā)送中斷信號。
控制寄存器第12位ass:是否自動產(chǎn)生片選信號。
分頻寄存器:spi_divider_sel。
狀態(tài)寄存器:spi_ctrl_sel。
數(shù)據(jù)寄存器O:spi_tx_sel[0]。
數(shù)據(jù)寄存器1:spi_tx_sel[1]。
數(shù)據(jù)寄存器2:spi_tx_sel[2]。
數(shù)據(jù)寄存器3:spi_tx_sel[3]。
片選信號寄存器:spi_ss_sel。
1.4 控制模塊
對于控制模塊來說,其實現(xiàn)方法是利用基于Verilog語言的有限狀態(tài)機來實現(xiàn),相當(dāng)于一條一條的指令來控制SPI模塊接收發(fā)送數(shù)據(jù)。控制模塊分成三個獨立的部分即接收控制模塊、發(fā)送控制模塊及NRF905配置模塊。其中接收與發(fā)送控制模塊分別包含對SPI進(jìn)行配置的狀態(tài)。下面對接收控制模塊的設(shè)計進(jìn)行說明。圖4即為Debussy綜合出的狀態(tài)機轉(zhuǎn)換圖。

















評論