多單片機直流電源控制板設計

3 軟件設計
3.1 同步配合的實現
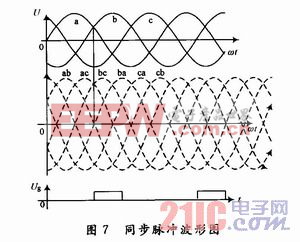
首先根據三相同步電壓信號向單片機提供中斷信號,在單片機響應中斷以后,根據三相全控橋整流電路對觸發脈沖的要求來出觸發脈沖。每當到a,b相的換相點時,如圖3(a)所示,a相與b相之間的相電壓比較會產生一下降沿信號給U18單片機的外部中斷1引腳(INT1),通過中斷服務事件產生一個同步脈沖,同步脈沖送U20(AT89C52),波形圖如圖7所示。
3.2 觸發脈沖移相及脈寬控制
該系統是通過改變單片機片內定時/計數器的計數值達到改變觸發角,從而改變直流電壓和直流電流的大小。
U18單片機產生的同步脈沖送到U20單片機,U20單片機通過將測量值與整定值進行比較,比例調節,使得測量值等于整定值,同時產生移相脈沖給U23的外部中斷1(INT1),響應外部中斷1后,P1口就開始輸出第一個編碼脈沖,同時定時,對應每60°發一個編碼脈沖,一直到最后一個編碼脈沖發送完成,再返回等待外部中斷1(INT1)的下一中斷請求,即上層機發送移相同步脈沖給U23單片機。脈沖編碼中采用雙脈沖編碼,實現雙脈沖觸發。在此過程中,T0作計數器用,計數滿N次則發觸發脈沖。N的計算方法如下:
已知:電源頻率f=50 Hz,晶振頻率F=8 MHz,定時為60°,則:![]()
根據N值以及定時/計數器的工作模式,可以計算出定時/計數器的初值。
3.3 比例控制調節程序
為使輸出電壓/電流值和整定值吻合,在軟件控制中,使控制量正比于整定值與測量值之間的偏差,從而使實際輸出值不斷跟隨整定值,最終達到一致。另外,在該子程序中,系統啟動后,在5 s之內,調節子程序只允許控制量以一個單位為步長,步進增加,這樣可以防
止電壓上升過快,從而實現軟啟動。
控制量正比于測量值與整定值的偏差,理論上采用PID算法,調節用離散差分方程表達式如下:
式中:en,en-1,en-2分別為第n次,n-1次和,n-2次電壓的偏差值;KP,TI,TD分別為比例系數、積分系數和微分系數,T為采用周期。
4 結語
該直流電源控制板在設計中具有以下幾大突出特點:
(1)采用中斷功能:四片51系列單片機,每片有4個中斷源,如同步、移相、相序判別及缺相等信號的傳遞均利用中斷功能,從而明顯提高了系統響應速度和可靠性。
(2)A/D的分辨率為12位,定時器的最小計數間隔為1.5μs,小擾動時電壓電流精度可達5‰。
(3)具有電源相序自動識別、缺相自動檢測、故障報警及狀態顯示等功能。
(4)多單片機控制設計,使單片機功能單一,提高了調節速度及系統性能的可靠性。










評論