基于PIC的低速率無線語音通信系統

2.2 CPU模塊的軟件實現過程
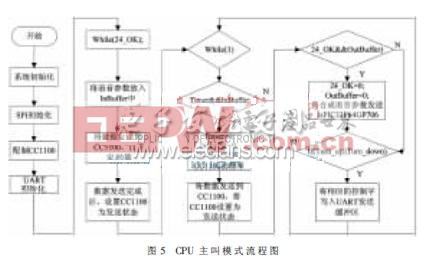
PIC24是整個系統的控制芯片,實現對輸入按鍵信息的處理、發送音量調節命令、配制CC1100、產生跳頻圖案、控制數據發送時機等功能。向CC1100發送數據進行同步控制,主要是為了通信終端以時分復用的方式占用信道,具體是在一個語音幀內(30 ms),信道被分配給終端A 10 ms,空閑5 ms作為保護時隙,再分配給終端B 10 ms,留5 ms的保護時隙,這樣在一幀語音的時間內,可以完成數據的發送和接收,實現兩臺終端的同步對話。通信終端在發送數據時分為主叫方和被叫方兩種模式,圖5給出了CPU主叫模式的流程圖。
本文設計的系統中豐富的PIC外設資源和靈活的外圍接口電路可以為語音信號處理的其他算法研究和實時實現提供一個通用平臺,也為進一步處理噪聲抑制和回聲控制奠定了硬件基礎。本文引用地址:http://www.104case.com/article/155873.htm

p2p機相關文章:p2p原理











評論