新的微弱GPS信號快速捕獲算法

捕獲方案基本流程如下:
(1)數據讀取。將中頻采樣數據按固定的8比特160 ms的長度,逐次讀取,每次延遲1 ms的數據位。
(2)快速累積。對數據進行交替半比特相干累積,并將結果分為奇偶兩組。
(3)相關運算。將第(2)步所得兩組數據分別與本地幀同步碼進行滑動相關運算。
(4)碼并行捕獲。與幀同步碼相關后的數據進行碼并行捕獲運算,嘗試尋找接收數據的C/A碼初相與載波頻點。
(5)數據分析。估計數據比特的翻轉位置,判斷幀同步碼是否出現。
(6)捕獲判決。如果當前數據組的捕獲峰值超過捕獲門限,則輸出對當前衛星的捕獲結果;否則等待幀同步信息出現,再比較捕獲峰值是否超過捕獲門限。如捕獲時間超過6 s,則結束對當前衛星的搜索。
(7)延遲控制。默認情況數據讀取起始位置比上次延遲20 ms。當數據分析估計出數據比特翻轉位置時,則根據估計結果,對讀取數據的位置在默認值上進行整數個毫秒的調整。
(8)互相關抑制。當某顆衛星的檢測信號峰值遠遠大于捕獲門限時,則認為接收信號中存在著強衛星信號,為了減少該信號在捕獲過程中對其他弱GPS信號的影響,在成功捕獲該強GPS信號后,對其進行互相關抑制。
精細捕獲是為了驗證相對捕獲的準確性,進一步提高捕獲的精度。由于,當信號中出現幀同步碼時才會有較高的相關能量值和峰值,因而進行的精細捕獲所用數據是包含幀同步信息的一段,并且正確估計了比特翻轉的位置,所以精細捕獲就可以通過進一步延長相干累積時間來捕獲較弱的GPS信號。
4 方案具體實現
4.1 可見衛星預測
GPS接收機冷啟動捕獲衛星信號時,搜索衛星是一個耗時的過程。弱信號環境下的衛星搜索將會耗費更多的時間,因而通過對衛星可見性的預測來減少搜索衛星的數目,對高靈敏度GPS接收機具有較大實際意義。
由于高靈敏度GPS的應用多數是低速運動的環境,加上當前GPS衛星軌道的穩定性大為提高。因而假定接收機在某個大的地域之內,根據已知的衛星歷書(最長有效期為半年)得到GPS衛星的仰角,從而估計出可見衛星的顆數。根據仰角可得到最佳衛星搜索的次序,從而提高衛星搜索的效率。經過對衛星可見性的預測,僅需搜索十幾顆衛星,比默認的盲搜索衛星的數目大為減少。
4.2 相干累積時長限制
由前面的式(2)和式(3)可知,接收載波與復制載波間的頻率差fe會在檢測量V中引入值為|sinc(feTcoh)|的損耗,這會增大信號檢測的漏警率和降低信號捕獲的靈敏度。通常將相干積分的頻率誤差損耗限制在3dB之內,此時對應|sinc0.443 |=0.7071,即|feTcoh|0.443。在僅考慮多普勒頻移造成的頻率差時:
由此計算出相干累積時長Tcoh不應超過0.69s。
4.3 數據分析
本捕獲方案中,通過對多段數據直接進行疊加,再利用幀同步信息的自相關特性來提高信號的處理增益,但未知數據翻轉依然限制著相干累積的性能。根據文獻提出的比特翻轉估計方法,通過比較相關運算的幅值能量大小來估計數據比特翻轉位置。本文引用地址:http://www.104case.com/article/155855.htm
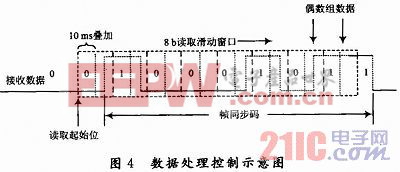
由圖4可知,當對一組8 b數據進行交替半比特相干累積后,數據比特翻轉要么在奇數組數據中,要么在偶數組數據中。對于存在數據比特翻轉的數據組,其相關運算的幅值能量應當小于另外一組。
![]()
式中:pow(n)為第n組數據的相干累積后幅值能量。
由于幀同步信息具有自相關特性,當處理的一組數據中含有幀同步碼時,捕獲運算的相關幅值能量pow(n)應明顯高于其他組。同時由于對接收信號進行了幀同步碼和C/A碼兩級相關運算,捕獲結果的峰值也應當高于其他數據組。因此根據pow(n)和捕獲運算峰值的大小,可以在完成捕獲的同時估計出幀同步信息的位置。
4.4 互相關抑制
目前主要的四類互相關抑制技術有:多門限檢測法、多峰檢測法、扣除法、子空間投影法。對互相關的處理思想,要么是判斷相關結果主峰是否是由互相關引起的,從而決定對結果的取舍;要么通過一定的方法計算出強信號的互相關結果,進而從信號中消除互相關干擾的影響。文獻提出的互相關減去法,都是基于對強信號相關值進行估計后,再將其從接收信號相關值中減去的方式來消除互相關的影響,需要計算強信號的多個相關值,計算量很大。扣除法則是在載波和偽碼剝離前,基帶數字信號處理模塊先在接收信號中扣除強信號成分。該方法的思路和實現比較簡單,可以利用后級跟蹤環路的信息進行實現。
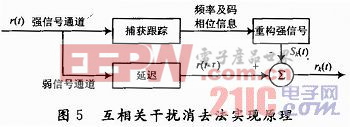
總體而言,在GPS弱信號捕獲中,互相關干擾的抑制存在著較大的難度。由于本捕獲方案中使用了多級的捕獲門限設置,因而具有一定的抗互相關干擾的能力。所以在這里采用扣除法的思想,通過重構強信號的方法將接收信號中的強信號成分消除。互相關干擾消去法的基本原理如圖5所示。
5 性能仿真與實測結果
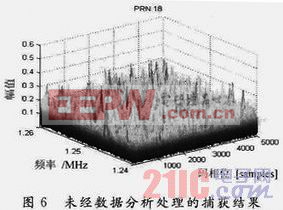
在Matlab環境下進行仿真分析,可以準確地控制仿真數據的信噪比,從而準確地評估算法的性能。GPS數字中頻的產生,噪聲帶寬Bn按C/A碼信號頻譜主峰帶寬2.046 MHz選取,從而在信號中加入功率為-140 dBW的高斯白噪聲,通過控制信號幅值產生任意信噪比的仿真信號。仿真信號的中頻頻率為1.25 MHz,采樣頻率為5MHz,捕獲程序從仿真數據任意位置開始讀取數據。當信噪比SNR=-42dB時,本方案對6s的仿真數據進行捕獲。可看出,當捕獲運算中沒有進行數據分析和結果處理時,無法找到明顯的峰值,如圖6所示;通過數據比特翻轉位置估計和數據分析,捕獲結果可以獲得明顯的相關峰值,如圖7所示。










評論