頻譜儀多種內(nèi)核間通信機(jī)制的方案設(shè)計(jì)

1.2 SPI接口電路設(shè)計(jì)
SPI接口是一種串行通信接口,它由4根信號線組成,其中SPCK、MOSI、MISO為復(fù)用,ARM通過片選信號NPCS來選擇與不同的從器件通信。本課題中ARM通過SPI總線分別與中頻板FPGA、源掃板FPGA通信。ARM與FPGA的硬件連接如圖3所示。ARM為主機(jī)模式,其SPI接口的SPCK、MIS O、MOSI分別與從機(jī)FPGA的SCLK、MOSI、MISO連接。ARM共有4根片選線。這里采用NPCS1選擇中頻板FPGA,NPCS2選擇源掃板FPGA。本文引用地址:http://www.104case.com/article/155536.htm

2 多核間的通信機(jī)制
2.1 ARM與DSP的通信機(jī)制
ARM在Linux系統(tǒng)啟動后,會先進(jìn)行一系列的初始化,包括對HPI、SPI等通信接口的初始化以及重啟DSP,實(shí)現(xiàn)時(shí)序上的同步。ARM在初始化完成后,會向DSP發(fā)送握手信號,即通過PB9向DSP的GP11口寫入數(shù)據(jù),表示ARM完成初始化,可以接收DSP的發(fā)送數(shù)據(jù)。而DSP完成數(shù)據(jù)處理以后,會等待ARM的握手信號,即不斷訪問GP11口是否收到數(shù)據(jù)。當(dāng)DSP收到握手信號之后,會向GP12口寫1以中斷ARM主機(jī)的其他工作,以便ARM來讀取DSP已處理好的數(shù)據(jù)。ARM收到中斷信號以后,通過設(shè)置HCNTL0、HCNTL1對HPIC操作來清除中斷,然后寫HPIA以告訴DSP從什么位置開始進(jìn)行自增讀。然后DSP將數(shù)據(jù)從DMA傳送到HPID中,ARM通過讀HPID來獲得數(shù)據(jù)。由于ARM與DSP的HPI接口是16位數(shù)據(jù)傳輸,所以要軟件實(shí)現(xiàn)將兩次讀取的16位數(shù)據(jù)合并成32位,然后傳給上層應(yīng)用程序。ARM讀取完數(shù)據(jù)后,向DSP的指定地址寫入0xffffffff,通知DSP瀆取成功,準(zhǔn)備下次數(shù)據(jù)傳輸。
ARM在接收到上層應(yīng)用程序下發(fā)的命令后,通過對命令的解析、計(jì)算,得到各種參數(shù).然后通過HPI下發(fā)給DSP。其流程是:首先通過HCNT L0、HCNTL1寫HPIC寄存器,配置讀寫模式。然后寫了HPIA寄存器,設(shè)置寫入DSP的物理地址。通過連續(xù)寫HPID寄存器來發(fā)送控制參數(shù),最后寫入0x5555aaaa,表示發(fā)送完畢。
2.2 ARM與FPGA的通信機(jī)制
ARM集成了SPI接口,通過SPI與FPGA進(jìn)行數(shù)據(jù)通信。SPI總線的“單主機(jī)多從機(jī)”模式正適合本課題中ARM同時(shí)與中頻板FPGA與源掃版FPG A的通信。ARM啟動Linux系統(tǒng)后,先對SPI接口進(jìn)行初始化,包括對PIO控制器編程,將SPI引腳分配給外設(shè),配置PMC(電源管理控制器)以使能SPI時(shí)鐘以及將ARM配置為主機(jī)模式。當(dāng)上層軟件下發(fā)命令后,ARM先將接收到的命令字進(jìn)行解析,解析命令得到各種參數(shù):經(jīng)過計(jì)算后,通過SPI接口的片選NPCS來選擇中頻板FPGA或源掃板FPGA來下發(fā)參數(shù)。
由于中頻板FPGA和源掃板FPGA的功能各異,接收的參數(shù)也不盡相同,所以制定了不同的數(shù)據(jù)幀格式及發(fā)送規(guī)則。ARM向中頻板FPGA每幀數(shù)據(jù)傳送16位,傳輸頻率為0.36 MHz。發(fā)送順序?yàn)椋郝酚纱a1、數(shù)據(jù)幀1、路由碼2、數(shù)據(jù)幀2、結(jié)束碼。ARM向源掃板FPGA每幀數(shù)據(jù)傳送16位,傳輸頻率為0.36 MHz。發(fā)送參數(shù)前都要先發(fā)送一個(gè)存儲這個(gè)參數(shù)的虛擬地址,然后發(fā)送參數(shù),順序?yàn)椋禾摂M地址1、參數(shù)1、虛擬地址2、參數(shù)2、結(jié)束碼。
3 嵌入式Linux設(shè)備驅(qū)動簡介
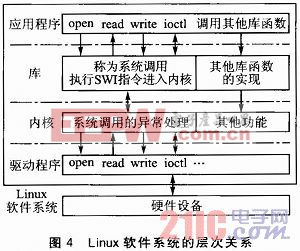
一套完整設(shè)備的軟件系統(tǒng)開發(fā)可分為:應(yīng)用程序、庫、操作系統(tǒng)(內(nèi)核)、驅(qū)動程序。Linux軟件系統(tǒng)的層次關(guān)系如圖4所示。驅(qū)動程序的作用存于連接軟、硬件,即內(nèi)核通過驅(qū)動程序來完成對硬件設(shè)備的操作。在Linux系統(tǒng)中,應(yīng)用程序運(yùn)行于“用戶空間”,并不能直接操作硬件,這可以避免應(yīng)用程序的錯(cuò)誤使得整個(gè)系統(tǒng)崩潰。而驅(qū)動程序運(yùn)行于“內(nèi)核空間”,它是系統(tǒng)信任的一部分。所以應(yīng)用程序要對硬件操作,就要首先使用庫提供的系統(tǒng)調(diào)用來進(jìn)入內(nèi)核。內(nèi)核匹配后,調(diào)用相應(yīng)的驅(qū)動程序函數(shù),從而完成對硬件的操作。





評論