基于Android的機頂盒CAS系統的開發

2.3 智能卡任務模塊
智能卡的通信標準有T0和T1兩種,T0按字節傳送,T1按塊傳送,而在設計過程中通常支持兩種協議。一般采用I2C總線通信,而智能卡內部一般沒有上拉電阻,所以在電路設計過程中,SCL和SDA的引腳處必須加上拉電阻,否則無法正常通信。根據通信協議,如果要對智能卡數據讀寫操作,首先要發送5字節的命令字,這5字節命令字依次為CLA、INS、P1、P2、P3,其中CLA為指令類型,INS為命令符,P1、P2為操作文件位置,P3為后續字符數。智能卡接收到命令符就可以根據命令種類對其后續數據進行操作,同時智能卡就可以發出兩個字節W1、W2的應答符。如果成功,W1、W2分別為0x90、0x00;如果不成功則會返回相應的代碼,以便給開發者提供調試。因為智能卡內部十分復雜,篇幅有限,所以想深入了解原理的話可以參考智能卡標準,這里僅介紹機頂盒操作智能卡過程的設計。本文引用地址:http://www.104case.com/article/154097.htm
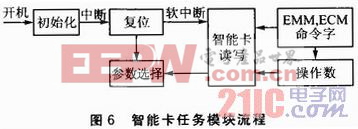
如圖6所示,在智能卡任務模塊中,在系統啟動之初,未進入文件系統之前,就要對智能卡進行初始化,分配內存池,強制為智能卡復位,從而選擇通信類型(T0或T1),全部完成之后就可以進入文件系統。通過CAS_CARD_TASK()為智能卡建立線程,在其線程內部使用CAS_CARD _ReceiveMessage()接收來自EMM或者ECM的命令字。如果合法,通過CAS_CARD_SendMessage()可以把應答字給其兩個模塊,同時通知其他兩個模塊發送操作數,若是EMM則到此結束,若為ECM則智能卡會把解密的CW通過CAS_CARD_SendMessage()發送給機頂盒。
2.4 其他細節設計
CAS系統除了最重要的解擾以外,還有其他重要的附屬功能,如郵件、在線付費、在線充值、節目點播、區域限制、用戶管理。這些信息都存儲在EMM表中,所以EMM和ECM表的解析也是一個十分重要的步驟,只有正確地提取出 EMM中的CA信息,才能順利地進行下一步的操作。根據MPEG-2標準和PSI/SI協議,以及智能卡廠商的提供功能表,就能設計出EMM和ECM的解析函數。
表1列出了一個通用CA的描述符。
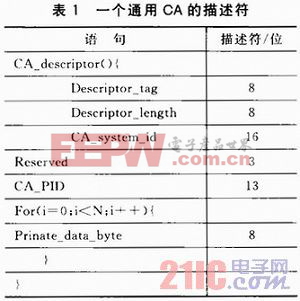
由于每個智能卡廠商的填充數據不一樣,所以必須根據廠商的定義再去提取數據、處理數據。由于筆者參與設計的是某公司提供的智能卡,所以數據的格式也都以它為標準。最終設計包括12個源文件、5個頭文件。
3 CAS子系統Android的移植
CAS終端子系統起初沒計由于涉及到與底層交互,采用的是C語言。如果想要使上層的JAVA環境調用其API,就要遵循JNI規范添加新的頭文件,使其應用層能夠方便地調用。同時Google在設計Androld之初就提供了NDK套件,有著獨有的交叉編譯器,使得原有的許多C語言編寫的驅動、應用程序可十分方便地移植到Android系統中。










評論