基于CSS技術的室內定位通信系統的研究與實現

無線定位技術近年來在工業和研究領域受到了極大的關注,高精度的定位服務在移動通信、智能交通和醫療等領域都具有廣泛的應用前景。目前使用最廣的是 GPS定位系統,其在室外環境下具有很突出的性能,能為飛機、船舶和車輛等目標提供精確的定位信息和導航服務。但是GPS系統的定位信號無法穿透建筑物, 不能完成對室內目標的定位[1]。針對無線定位領域,IEEE802.15.4a定義了兩種可實現高精度定位的物理層——脈沖超寬帶和Chirp擴頻 (CSS)[2-3]。Chirp信號又稱線性調頻信號,最先應用在雷達領域,隨著聲表面波(SAW)器件發展,其掃頻帶寬不斷增大,已經具有了一般超寬 帶信號的特點。Chirp擴頻信號具有時間分辨率高、抗多徑能力強、傳輸速率高、功耗低和系統復雜度低等特點,非常適合用于室內目標定位[4-6]。
本文設計了基于Chirp擴頻信號的室內定位通信系統,在利用Chirp擴頻信號實現數據通信的基礎上,使用雙邊雙向測距算法SDS- TWR(Symmetric Double Sided Two-Way Ranging)測量端點間的距離[7],計算出標簽點位置信息,并針對多標簽點同時定位情況下產生的沖突問題,設計了一套多標簽點情況下的系統管理算 法,對系統進行有效管理。
1 系統模型
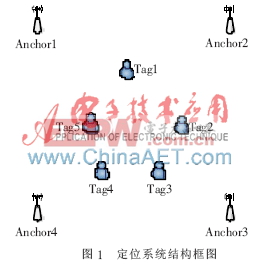
本文是基于多移動標簽點情況下的定位方案,其系統的結構如圖1所示。系統的組成包括4個固定錨節點(Anchor1、Anchor2、Anchor3和 Anchor4)、多個移動標簽點(Tag1、Tag2及Tag3等)和定位服務器。4個錨節點固定在定位服務區域的4個固定坐標點上,定位區域內的移動 標簽點處于對等關系,可以進行定位及相互間的數據通信。該系統使用一種改進的TOA測距算法——對稱雙邊雙向測距算法(SDS-TWR),利用該算法不需 要標簽點和錨節點的時鐘同步的優點,降低系統的實現難度[8]。系統工作時,當有移動標簽點需要定位時,系統標簽點依次向各個固定錨節點發出測距信號,固 定錨節點收到測距信號后,根據SDS-TWR算法產生相應的應答信號,與移動標簽點完成測距。移動標簽點分別與4個固定錨節點完成測距后,將距離信息通過 USB接口送入與其連接的定位服務器。由于各固定錨節點的坐標已知,定位服務器可以通過LLOP算法計算出移動標簽的坐標,并進行顯示。
2 硬件設計
目前,Chirp信號的調制與解調主要使用聲表面波器件(SAW)完成,單獨設計并完成一套Chirp信號發射機和接收機較為復雜,成本較高,并且不利 于硬件的集成化。本系統選用nanoPAN 5375射頻收發模來完成基本的Chirp通信功能。nanoPAN 5375射頻收發模塊由德國nanotron公司生產,采用Chirp擴頻技術,擴頻帶寬達到80 MHz,工作在2.4 GHz ISM頻段,最高數據傳輸速率高達2 Mb/s。此外,其內部包含高精度的實時時鐘和定時器,利于SDS-TWR測距算法的實現。nanoPAN 5375射頻收發模內部完成了對射頻信號的產生與處理,只需要通過SPI接口對其內部寄存器進行操作。系統的硬件結構可以分為移動標簽點和錨節點兩部分。
2.1 錨節點硬件設計
錨節點的硬件主要基于Atmega128 8 bit單片機和nanoPAN 5375射頻收發模塊。Atmega128屬于AVR系列,具有低功耗、操作簡單等特點,并且自帶完整的SPI接口控制器,可以作為主機和從設備使用,能 夠勝任錨節點中對nanoPAN 5375射頻模塊的控制及數據收發工作。nanoPAN 5375射頻模塊的ANT腳通過一條阻抗為50 ?贅的微帶線與2.4 GHz天線連接,微帶線的阻抗誤差會對發射信號的功率產生影響。錨節點硬件結構框圖如圖2所示。

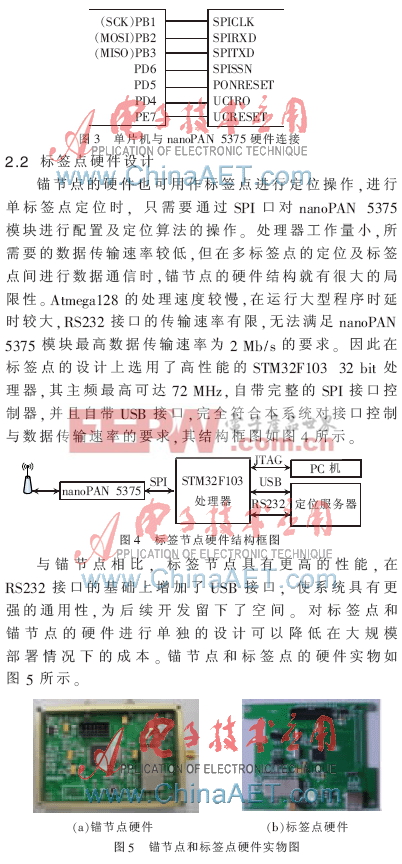
模擬信號的調制、解調和放大等處理都由nanoPAN 5375模塊完成,并通過2.4 GHz天線進行收發。JTAG接口和RS232接口則用于系統的調試。Atmega128單片機通過SPI總線和幾個控制端口對模塊進行控制。 Atmega128單片機與nanoPAN 5375射頻模塊的連接如圖3所示。SPICLK、SPIRXD、SPITXD、SPISSN分別為SPI總線的時鐘、數據接收、數據發送和片選端口。通 過PONRESET引腳對模塊進行復位,模塊初始化前應通過該引腳對模塊進行復位操作。UCIRQ和UCRESET分別為單片機中斷和復位引腳。
3 系統軟件設計
系統軟件分為標簽點/錨節點軟件和定位服務器軟件兩部分。標簽/錨節點軟件完成SPI接口驅動、測距算法、測距結果返回和系統管理算法;定位服務器軟件完成與標簽點的接口驅動、數據處理計算和用戶界面。
nanoPAN 5375模塊的SPI接口的最高數據傳輸速率為16 Mb/s,接口的時序及數據模式可以通過寄存器進行設置。Atmega128和STM32F103處理器帶有標準的SPI接口控制器,將它配置成主機模 式,數據格式設置為8 bit、大端模式,數據速率小于16 Mb/s。向nanoPAN 5375模塊的0x00地址寫入0x42,將模塊的SPI接口設置成相同的模式。
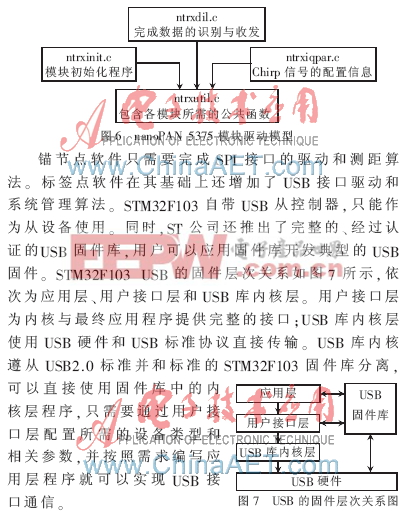
對nanoPAN 5375模塊的控制程序主要包括ntrxinit.c、ntrxiqpar.c、ntrxdil.c和ntrxutil.c,它們的關系如圖6所示。 ntrxinit.c和ntrxiqpar.c完成對模塊硬件的初始化,包括寄存器、硬件接口、擴頻帶寬和傳輸速率的設定,本系統將帶寬設置為80 MHz,數據傳輸速率設置為最高的2 Mb/s。ntrxdil.c完成數據的接收與發送、定位算法和中斷響應等功能的具體實現函數。ntrxutil.c則封裝了大量與模塊操作相關的共用函 數,方便各模塊的調用。
本系統使用的是對稱雙邊雙向測距算法,它相當于在被定義的時間內進行了兩次TOA測量。TOA測距通過測量信號在兩端點間的傳輸時間來測量距離,因此對 時間精度有著嚴格的要求,這意味著在兩次TOA測量的過程中不允許發生因數據碰撞而引起的重傳。這在單標簽點的情況下是很容易實現的,但是在多標簽點的環 境下就完全不同了。標簽點必須進行統一的管理來避免碰撞的發生,且該管理算法必須保證整個系統的平等性與高效性。為了達到這一目標,設計了圖8所示的定位 管理算法。
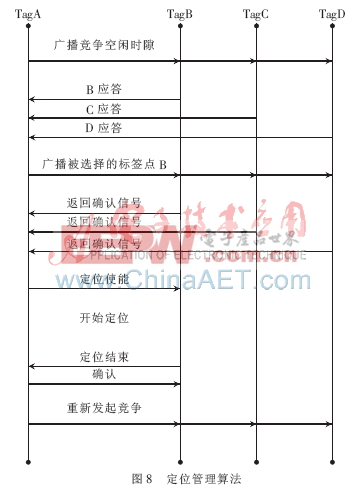
在系統內的眾多標簽節點中選擇一個作為網絡主協調控制器來控制標簽節點和錨節點的時序。作為主協調控制器的標簽節點周期性地發送廣播包來發起空閑時隙的 競爭。每一個標簽在收到廣播信號后發送應答數據包競爭空閑時隙。作為主協調器的標簽節點接收到應答信號后,根據競爭選舉算法選出一個標簽點,同時廣播包含 選取結果的廣播數據包。各標簽點收到選舉結果后返回確認信號,沒有被選中的標簽點進入等待狀態,被選中的標簽點和系統內的4個的錨節點分別進行測距。在被 選中的標簽點完成測量之前,其余的標簽點進入等待狀態等待下一次的時隙。被選中的標簽點完成測量后向作為主協調器的標簽節點發送定位完成信號并進入等待模 式,主協調器標簽點收到定位完成信號后,重新發起競爭。為了避免某個標簽點被重復選取而造成的不平等,需要對標簽點進行優先級管理。在編程中運用隊列原 理,一個標簽點完成定位后將其放入隊尾,使其競爭優先級排到最低,從而避免重復分配造成的不平等。重復這些步驟直到所有的標簽點完成測量。
定位服務器在系統中主要完成與標簽點的接口驅動、數據處理計算和用戶界面,通過USB接口接收標簽點的距離數據,使用LLOP算法計算出移動標簽的坐 標,并通過顯示界面顯示出標簽點的相對位置信息。由于標簽節點使用USB接口,具有很強的通用性,因此定位服務器可以為PC或其他的嵌入式系統。
4 定位結果分析
該系統的最大定位距離可以達到800 m,為了檢驗該系統的定位性能,分別將該系統在室內和室外兩種環境下進行定位實驗,定位結果如下。
4.1 室外環境定位
室外實驗選用一個寬闊的球場,定位區域內無障礙物,4個錨節點放置在一個60 m×60 m的正方形區域的4個端點。將標簽點放置在正方形區域內的多個已知坐標點上進行測量,部分定位結果如圖9所示。

從圖10可以看出,室內環境下的測量坐標和實際坐標有一定的誤差,誤差的大小也相差較大。在小于2 m的區域誤差很大,這是由于在短距離條件下信號傳播時間較短,干擾、時鐘誤差和定時器誤差對測量結果的影響較大。大于2 m后的誤差明顯減小,有兩個點的誤差在20 cm以內,因此在中遠距離情況下,該系統在室內環境下也具有較高的定位精度。
通過比較兩種環境下的定位結果可以看出,在同為視距環境下,在室內定位精度與穩定性不如室外定位,這是因為室內環境受多徑效應干擾更為嚴重。同時可以看 到,定位距離在3 m以上的中遠距離定位的相對精度較高,這恰恰是實際室內定位應用中最常用的,因此,該系統具有較高的實用價值。
本文利用Chirp擴頻信號抗干擾、抗多徑能力強的特點,利用SDS-TWR測距算法,設計并實現了一個室內定位通信系統,并設計了一套系統管理算法實 現了對系統的管理,該系統在室外和室內都可以獲得較高的定位精度。該系統結構簡單,具有很強的通用性,可以作為單獨的定位通信系統或者作為一個功能部件嵌 入到其他系統中,具有較廣的應用前景。
參考文獻
[1] 廖丁毅,王玫,鄭霖,等.基于脈沖鎖相環的超寬帶定位接收機設計[J].桂林電子科技大學學報,2010,2(1):17-20.
[2] KIM J E, KANG J, KIM D, et al. IEEE 802.15.4a CSS-based localization system for wireless sensor networks[C]. IEEE Interational Conference on Mobile Adhoc and Sevor Systems, 2007:1-3.
[3] LEE C, KIN J Y. The positioning system based on IEEE 802.15.4a PHY and MAC protocol for low rate WPAN[C]. International Conference on Control, Automation and Systems, 2008:1462-1465.
[4] WINKLER M. Chirp signals for communications[C]. Wescon Convention Record, 1962.
[5] PINKNEY J. Low complexity indoor wireless data links using Chirp spread spectrum[D]. Calgary: Doctor Dissertation of the University of Calgary, 2003.
[6] BUSH H, MARTIN A R, COBB R F, et al. Application of Chirp SWD for spread spectrum communications[C]. Proceedings of the 1973 IEEE Ultrasonics Symposium, Monterey, IEEE Press, 1973:494-497.
[7] KWAK M, CHONG J. A new double two-way ranging algorithm for ranging system[C]. IEEE International Conference on Network Infrastructure and Digital Content, 2010:470-473.
[8] 劉林.無線定位基本概念與原理[J].學術動態,2007(4):11-17.

通信相關文章:通信原理






評論