基于WiFi及無線遙控技術遠程控制井下鏟運機

1.2 車載接收/發送單元
1.2.1 車載接收單元
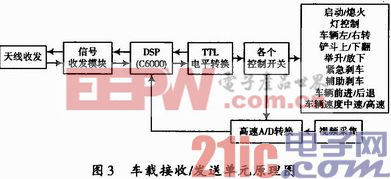
無線信號通過天線被信號收發模塊接收,然后經過DSP(C6000)處理,在經過TTL電平轉換,將信號輸送到各個控制開關,來控制各個動作。從而實現在安全區域內無線遙控駕駛。如圖3所示。本文引用地址:http://www.104case.com/article/153514.htm
該接收單元不僅能夠接收來自地面的遠程控制無線信號,也能接收近距離的無線控制信號。該收發模塊在向網絡中發送數據包之前先檢查網絡的狀態。當它檢測到智能接入點沒有控制信號發出時,就發送數據包,傳送到地面控制顯示平臺,從而獲得實時狀態信號;如果檢測到此無線電頻率上有其他數據,該模塊只是接收信號對鏟運機進行控制。通過車載單元上的遙控/手控開關也可以實現遙控跟手動的切換。
1.2.2 車載發送單元
鏟運機前后都裝有攝像頭,用于采集實時視頻,采用專用高速數字信號處理板進行。如圖3所示。引擎控制:高電平保持引擎運動,輸出低電平使引擎熄滅;緊急剎車:高電平釋放緊急剎車;輔助剎車:高電平釋放輔助剎車;快/慢檔位控制:電平切換到快速檔位,低電平在慢速檔位;前進控制:高電平轉換到前進擋位;后退控制:高電平轉換到后退檔位;舉升控制:高電平轉釋放舉升;放下控制:高電平轉釋放放下;鏟斗上翻:高電平釋放上翻;鏟斗下翻:高電平釋放下翻;左行控制:高電平轉換到左行檔;右行控制:高電平轉換到右行檔位。

所有的電平信號被采集傳到高速A/D轉換器,轉化為數字量。采用DSP(C6000系列)將轉換后的電平信號及視頻信號進行采集并且壓縮,通過無線網絡進行發送。數據會通過交換機通過以太網絡傳輸到地面控制臺,綜合顯示裝載機運行的各個動作,從而容易實現遠距離無線操作。其顯示界面包括狀態顯示界面、顯示控制界面、視頻顯示界面,如圖4所示。
2 鏟運機液壓改造線路
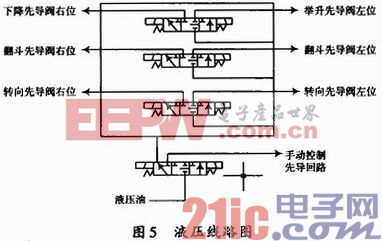
在原來液壓線路的基礎上,建立一套與原來手動操作并行的液壓回路,兩套回路前面有一個換向閥來進行手動控制與遙控控制的切換。在遙控時,采用三個比例式電磁閥來控制進入先導閥液壓油的方向,從而達到控制鏟運機鏟斗翻斗、動臂升降、轉向的要求。如圖5所示。
在制動回路中,采用NICO電液動制動閥與原來的腳踏制動閥相并聯,通過控制面板改變扭轉開關量來輸入不同的電壓值控制閥口的開閉大小,從而實現輔助制動。緊急制動電磁閥可以直接通過控制單元控制。







評論