基于WiFi及無線遙控技術遠程控制井下鏟運機

摘要:在地下施工環境惡劣,工作人員無法到達的情況下需要對機械進行遙控操作。利用WiFi無線通信跟無線電遙控技術對鏟運機機進行無人駕駛遙控操作技術進行了相關的研究,在原有液壓線路的基礎上做了線路修改使其滿足遙控要求。基于WiFi通過Ad Hoc方式直接建立點對點通信鏈路、地下無線網絡,可以很好的實現自動化無人遠程操作。
關鍵詞:鏟運機;WiFi;無線遙控;液壓;點對點通信;遠程操作
0 引言
隨著采礦深度的增加,地下開采的環境質量越來越差,對人的健康及生命安全造成了嚴重的威脅,再加上嚴格的環保,安全法規的相繼出臺,造成了地下礦產開采成本的提高,為滿足社會需求,必須要提高開采效率,因此催發了自動化技術的應運而生,而遙控系統的開發和應用勢必成為必不可少的一部分。
特別在近幾年隨著無線網絡應用于工業的技術的成熟,可以將WiFi無線網絡配合無線電遙控操作技術應用于地下鏟運機以實現遠距離無線操作,也可以在遙控模式下,駕駛員在遠離鏟運機的安全區域,通過無線遙控手柄單元控制鏟運機的各種動作。在生產效率上有了很大的提高,也在很大程度上保障了人的健康及生命安全。
1 地下裝載機的遙控部分
1.1 手柄控制單元
1.1.1 手柄控制單元
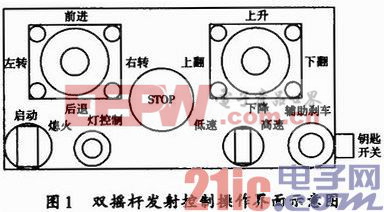
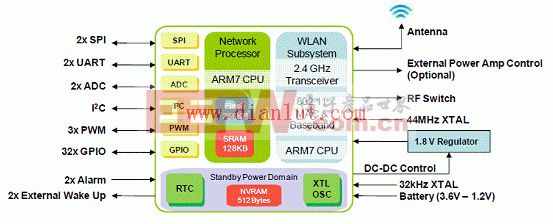
該單元包括一個帶ARM內核微處理器的核心板,一個2.4 GHz無線通信模塊,兩個控制手柄,2.4 GHz天線,底層信號采集板等。該單元要控制裝載機的前進/后退、換向、左轉、右轉、大臂舉升、大臂下降、裝料、卸料、油門增減。同時還要增加以下輔助功能,包括遠程啟動,熄火、駐車剎車、輔助剎車、前后燈的控制。采用無線遙控時,人員遠離鏟運機在安全區域作業時,可以借助操作盒,如圖1所示,實現安全作業。
1.1.2 內部信號采集處理及傳輸
本系統中有4路速變模擬信號、8路緩變模擬信號。該采集系統能實現采集0~5 V之間的模擬信號,兩者精度均在0.1%以內,信號記錄時間均不低于0.75 s,整體設計如圖2所示。在本系統中,由于模擬輸入信號的電壓范圍是0~5 V,所以此次設計使用LM324運算放大器組成的比例電路將輸入信號變換成0~2.5 V電壓。然后輸入模擬開關經過跟隨器后,再輸入A/D轉換器。這里采用AD7492轉換芯片,進行數據采樣。AD7492是AD公司推出的12位高速、低功耗、逐次逼近式A/D轉換器。它可在2.7~5.25 V的電壓下工作,其數據通過率高達1 MSPS。可以滿足采樣標準要求。

首先,對于4路速變信號而言,其最低采樣頻率為40 kHz,系統要求的最低記錄時間為0.75 s。采用了多路切換開關和一個AD7492循環進行數據采集,將4路速變信號和8路緩變信號交叉安排在ADG506上,這樣在每次速變信號采集后,緊接著采集8路緩變信號,經過循環交叉采集后,使得速變信號采樣率是緩變信號采樣率的2倍。然后將12路信號經模/數轉換后經ARM處理器處理后再經TLV5613數/模轉換,通過編碼器編碼傳送到無線發射模塊,經過2.4 GHz無線天線將信號發射出去。采用的TLV5613轉換器是12位電壓輸出數膜轉換器(DAC),它具有一個與8位微控制器兼容的并行接口。使用三個不同的地址來寫入8個最低位、4個最高位和3個控制位。TLV5613可工作于2.7~5.5 V較寬的電源電壓范圍。







評論