排爆機器人控制與無線通訊系統

 本文引用地址:http://www.104case.com/article/152491.htm
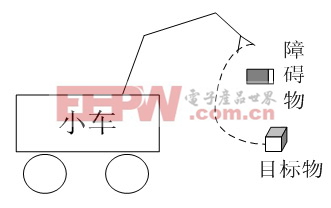
本文引用地址:http://www.104case.com/article/152491.htm圖4 機械手軌跡規劃示意圖
位于中間層的控制是機械手抓取運動控制中最關鍵的部分。它實際上是一個補間器。機械手的運動控制可分為姿態控制與手位置控制。腰、大臂、小臂、手爪的控制,是由主控計算機通過機械手運動學位移問題進行反向運動求解,得出腰、大臂、小臂、手爪的位置,然后給出各關節位置指令傳至上述關節的嵌入式系統控制計算機,完成帶有速度反饋環的位置控制。四個關節的運動速度通過機械手的軌跡規劃來決定,從而避免機械手的蛇形運動。由于有觸覺傳感器,手爪可以自動控制,也可以是在圖像信號的指引下作精細“柔軟控制”。抓取可疑爆炸物時,控制手爪夾持力約大于可疑爆炸物脫落重力,不至用力過大而夾壞可疑爆炸物,從而完成專家指定的動作。
位于最下層是控制級位置控制器與速度調節器均采用成熟的PID(包括P、PI、PD)控制。當PID控制其選擇合適的參數時,具有一定魯棒性,簡單、實用。當PID無法實現有效控制時,可改進之或結合其它方法,如前饋控制。運動控制包括機械手各個關節運動控制和行走運動,初步統計控制回路有13路,如圖5所示。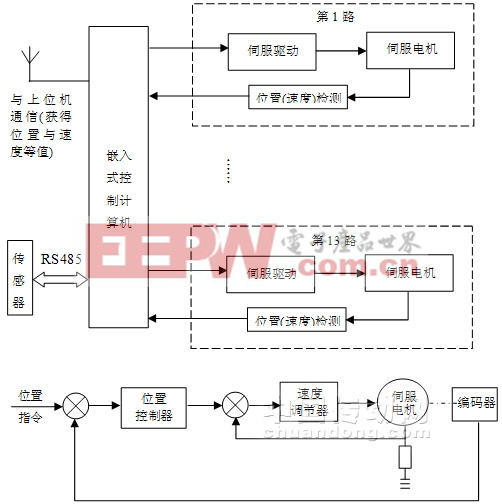
圖5 自動控制原理圖
嵌入式控制計算機根據上位計算機傳來的位置與速度信號,對各個伺服機構進行位置與速度設定,按控制規律(如PID)對伺服電機進行控制,使實際位置按預計的速度跟蹤或運動到目標位置。
機器人的手眼協調系統:機器人的手眼協調系統是本系統最大亮點之一。由于于補間器算法需要知道目標物與機器人基坐標(一般是機械人的腰關節底座),相對空間座標才能求解。而本系統目標物是在未知環境里。這相對坐標必須由于手眼協調系統來求解。排爆機器人機械手上裝有雙目系統,利用雙目系統和目標物可構成“測矩三角型”,原理示意如圖6。測矩三角型求得距離誤差較大,需要利用激光測距的“光斑”輔助測矩,從而獲得坐標物的空間座標。隨著機器人的雙目接近目標物,目標物與基坐標的相對坐標精度提高,經過數次雙目逼近目標物之后,最終實現機械手準確地抓到目標物。
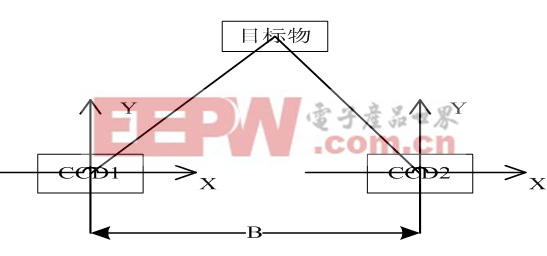
圖6 測矩三角型原理圖
linux操作系統文章專題:linux操作系統詳解(linux不再難懂)










評論