基于獨立DSP平臺的實時衛星導航接收機的設計

(3) 定位線程周期中斷
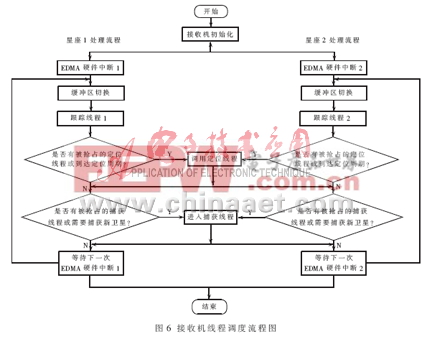
定位周期線程執行1次定位解算任務,并將定位結果寫入專門開辟的緩沖區中,隨后EDMA控制器會自動將結果通過McBSP1端口傳輸到顯示設備。該中斷的優先級高于捕獲線程,但低于跟蹤線程,在DSP平臺的平均執行時間為3 ms。
圖6所示為軟件接收機各線程之間的調度流程框圖。本文引用地址:http://www.104case.com/article/152134.htm
3 實驗結果
在實驗中,將接收機平臺設置為12 MHz,1 bit采樣,通過射頻前端與GPS天線相連,實時接收GPS衛星信號,利用RTDX技術通過JTAG口將結果傳輸到主機進行顯示。根據對各線程運算量的分析和實驗驗證可知,基于獨立DSP的衛星導航接收機平臺可以很好地完成6~10顆衛星的實時跟蹤,并能準確定位。圖7所示為對應的電子地圖結果。除此之外,本文所提到的多星座軟件接收機也開展了仿真試驗測試,目前能夠對每個星座系統實現4~5顆衛星的實時跟蹤,其性能仍需進一步提高。

本文詳細介紹了基于單顆高速定點DSP的實時衛星導航軟件接收機平臺的設計實現。提供了詳細的硬件平臺結構設計方案,闡述了系統上電自加載功能的實現方法以及接收機軟件任務調度流程。根據本方案實現的衛星導航軟件接收機具有低成本、低功耗、通用性好、功能可升級擴展等優點。










評論