基于S3C244O嵌入式Linux下C02激光雕刻系統步進電機驅動程序的設計

摘要:根據步進電機的工作機理,以及Linux驅動程序的實現機制,采用Linux2.6內核為操作系統,設計了在嵌入式Linux環境下,對基于Samsung公司生產的S3C2440處理器的二氧化碳激光雕刻系統步進電機的驅動程序,并通過驅動程序實現對步進電機的控制,使原有激光雕刻系統更加優化。
關鍵詞:激光雕刻;步進電機;Linux;驅動程序
0 引言
隨著嵌入式技術的不斷成熟,基于嵌入式系統編寫特制電路下的設備驅動程序也越來越受到人們的青睞。在各種嵌入式操作系統中,嵌入式Linux是免費的源代碼開放軟件,可根據需要任意進行剪裁。在嵌入式Linux開發過程中需要為指定設備編寫和編譯驅動程序,這與以往在PC機上的Linux驅動開發明顯不同,本文設計了基于S3C2440嵌入式Linux下激光雕刻系統的步進電機驅動程序。
1 硬件系統的設計
步進電機開環控制系統主要由中央控制器、步進電機驅動器、傳感器以及步進電機四大部分組成。本系統采用基于ARM920t內核的S3C244 0A微處理器作為控制系統的中央控制器,該芯片主頻400MHz,最高可達到533MHz,內含多種設備接口,存儲器使用64MB的Nand Flash和64MB的SDRAM。圖l所示為控制系統框圖。
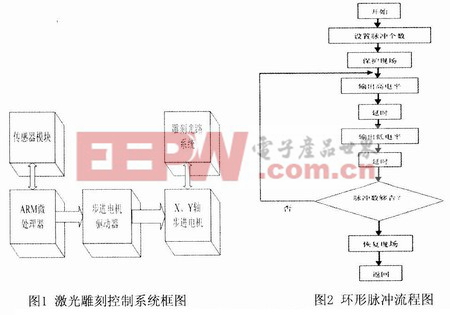
2 系統的工作原理
本系統主要控制兩個兩相混合式步進電機,分別代表X軸和Y軸帶動傳能光纖進行激光雕刻。系統采用8路I/O口進行脈沖輸出,每4路接一個步進電機驅動器,通過功率放大后,進入步進電機的各項繞組。電機有半步、整步兩種工作模式,整步模式的步距角為1.8°,半步模式的步距角為0.9°,整步一周共200步。如:半步模式的兩步進電機正轉脈沖為{0x11,0x33,0x22,0x66,0x44,Oxcc,0x88,0x99};整步模式為{0x11,0x22,0x44,0x88,0x11,0x22,0x44,0x88},一個步進電機運作時,只對脈沖時序的高或低4位操作,另外4位為0。而改變脈沖的順序,即可改變轉動方向。在整個控制系統中,數據處理在Linux應用程序中完成,步進量傳遞給Linux驅動程序后,由驅動程序完成脈沖輸出。通過軟件來完成脈沖分配,可根據應用系統的需要,隨時改變對步進電機的控制。








評論