基于ARM LPC2119的水情測報終端設計與實現

摘要:由于水情測報終端應用環境惡劣,保證水情測報終端的穩定性和低功耗顯得尤為重要,提出了基于ARM7LPC2119在水情測報上輸出單元的設計與實現,把嵌入式技術運用到水情測報控制中,設計了一個最小系統。在有人或無人的情況下。通過PC機或者上位機發送用戶需要的指令,遠程控制電機工作,從而控制閘門的升降,達到了水資源調度和控制的目的。詳細敘述了整個系統的功能及其構成模塊,給出了電源轉換模塊、中心模塊、通信模塊、外圍驅動模塊的硬件接口電路圖。本系統在都江堰下屬閘門經過實際運行表明設計是準確可靠的,實現了在無人的惡劣環境下的長時間低功耗穩定工作,比以往的設計更省電,更經濟適用,在市場上有廣泛的應用前景。
關鍵詞:ARM7 LPC2119;水情測報;電源轉換模塊;中心模塊;通信模塊
防洪、抗旱給國家和家庭造成巨大的經濟損失,水資源的優化調度和科學管理得到了人們的重視。因此,在水資源調度和控制方面投放了更多人力物力,能得到有效控制。而嵌入式技術為水情測報控制提供良好的技術平臺,設計了一個最小系統,能夠在有人或者無人的情況下,通過PC機或上位機發送用戶需要的指令遠程控制電機工作,從而控制閘門的升降,實現水資源調度控制。
1 系統總體結構
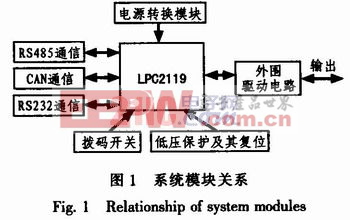
該系統總體設計結構主要由4個模塊構成,分別為電源轉換模塊、中心模塊(CPU模塊)、通信模塊、外圍驅動模塊等。這些模塊之間的關系如圖l所示。
2 系統硬件設計
2.1 電源轉換模塊設計
系統各個模塊需要使用5、3.3、1.8 V,特別是主芯片LPC2119所需要的電壓。因此該系統設計采用一個電源轉換模塊將電源板輸出的穩定12 V電源轉換為所需要的電壓。其中采用MAXl659將+12 V轉換為+5 V和+5 V_P,并通過程序控制該芯片的工作.從而控制了后續所需的+5 V_P電壓的任何電路;用MAXl658芯片將+5 V轉換為+3.3 V_P,并控制該芯片的工作,控制后面需要+3.3 V_P電壓的任何電路;采用MIC-5207芯片將+5 V轉換為+3.3、+1.8 V,供后面電路提供電源。每一個轉換后的電壓都用了一個發光二極管的亮滅來檢查這些芯片是否正常工作,亮表示工作正常,反之則表示此轉換器有問題(損壞)。









評論