虹膜識別終端系統(tǒng)限制因素分析及解決方案

O 引言
本文引用地址:http://www.104case.com/article/151359.htm虹膜是位于人眼表面黑色瞳孔和白色鞏膜之間的可見的環(huán)狀組織,在一定頻率的近紅外光下,可呈現(xiàn)出豐富的紋理信息,如斑點(diǎn)條紋、細(xì)紋、冠狀、隱窩等生理細(xì)節(jié)特征。人眼虹膜的可見生物組織結(jié)構(gòu)依賴于嬰兒胚胎期中胚層的初始條件,在人群中的分布可能是隨機(jī)的或是混沌的,但一出生就終生穩(wěn)定,而且每個人的虹膜紋理絕對地不同。統(tǒng)計表明,虹膜紋理有幾百個自由度,即使是同樣的基因型,其虹膜的表現(xiàn)型表達(dá)是不相關(guān)的。正因?yàn)槿搜酆缒お?dú)特的紋理圖像適合用于自動身份識別,所以其具有高效、準(zhǔn)確、不可復(fù)制等特點(diǎn)。基本原理主要是通過對比虹膜紋理圖像特征之間的相似性來確定人體的身份,其核心是經(jīng)計算機(jī)進(jìn)行大量的多種算法,使用模式識別、圖像處理等方法對人眼的虹膜紋理特征進(jìn)行描述和匹配(如早期應(yīng)用Gabor小波對虹膜紋理編碼,用漢民距離對虹膜模版進(jìn)行匹配),從而實(shí)現(xiàn)自動的人體身份鑒別。
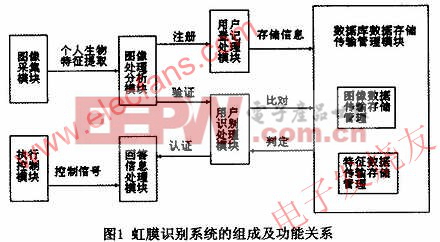
虹膜識別系統(tǒng)由軟件系統(tǒng)和硬件系統(tǒng)組成,其中軟件系統(tǒng)即虹膜信息處理系統(tǒng),用以實(shí)現(xiàn)虹膜圖像處理、用戶登記、用戶識別、虹膜圖像存儲管理、虹膜特征存儲管理等功能。構(gòu)成框圖如圖1所示。硬件系統(tǒng)包括虹膜圖像采集系統(tǒng)以及支持虹膜信息處理系統(tǒng)運(yùn)行的硬件環(huán)境。
目前市場上較成熟的計算機(jī)核心算法有英國劍橋大學(xué)的Daugman技術(shù)、英國巴斯大學(xué)的MJRLIN技術(shù)以及中國科學(xué)院的技術(shù)。本文實(shí)驗(yàn)系統(tǒng)采用英國巴斯大學(xué)的MIRLIN技術(shù)。
2 受限條件下的虹膜紋理圖像采集技術(shù)分析
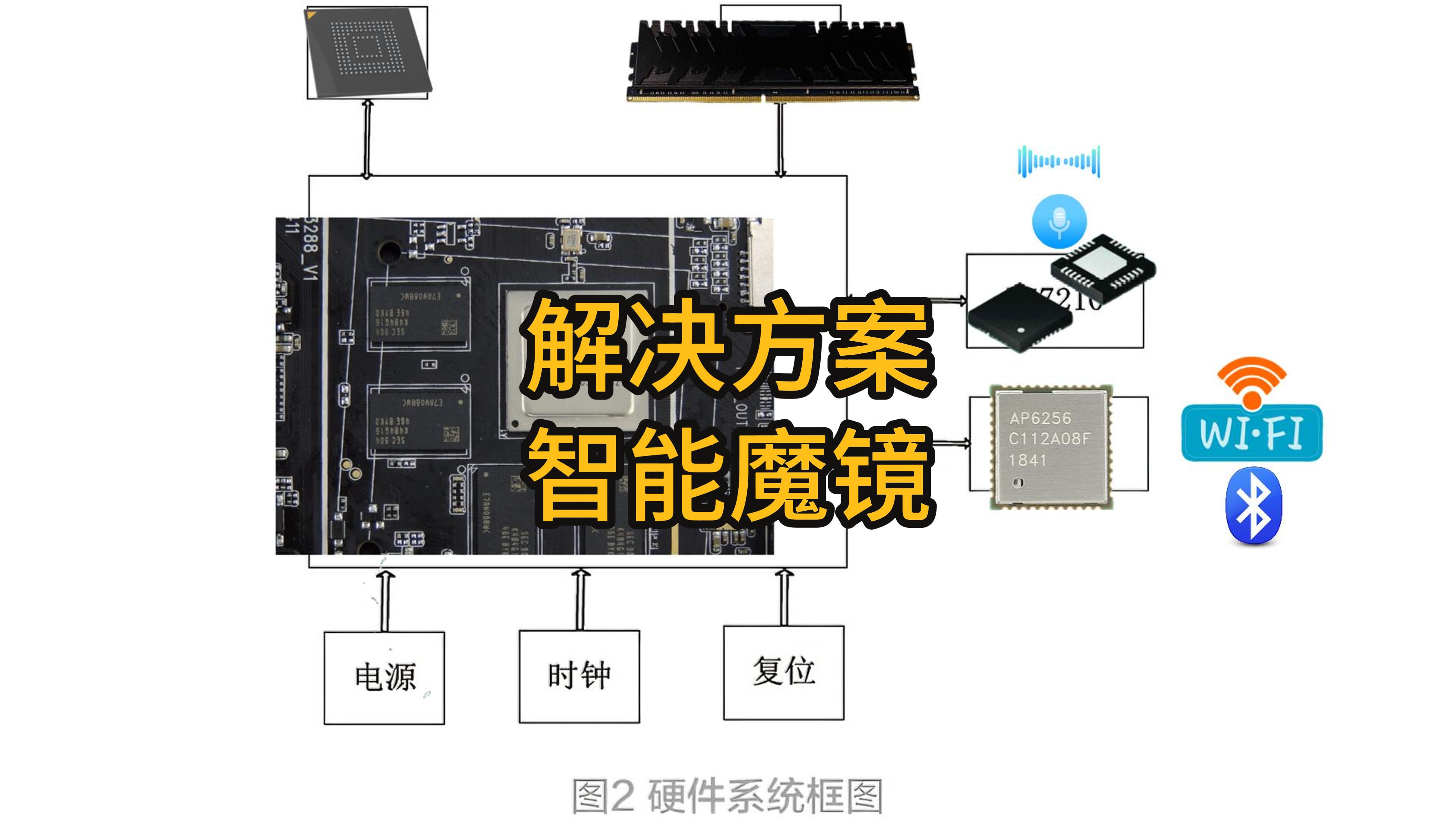
國際人眼安全標(biāo)準(zhǔn)協(xié)會要求虹膜圖像采集裝置為實(shí)時自動無侵害的虹膜光學(xué)成像裝置。目前世界上主流的虹膜鏡頭采用640×480像素以上的CMOS逐行掃描攝像頭,其中在人眼虹膜直徑范圍內(nèi)要求至少有100個像素采集點(diǎn)以上,盡可能地保留原始虹膜圖像的特征。根據(jù)ISO/IEC 19794-6圖像標(biāo)準(zhǔn),同時確保黑暗環(huán)境下拍攝的需要,光源選擇波長為720~900nm的近紅外光源,輻照功率0.5mW/cm2,對眼睛無傷害。攝像頭的傳輸速率設(shè)為251幀/s,保證視頻流的實(shí)時傳輸。拍攝過程中,中央處理模塊對每幀圖像作實(shí)時分析,直至該幀圖像滿足判別標(biāo)準(zhǔn),同時該數(shù)據(jù)幀被傳輸?shù)胶缒ぷR別處理器核心模塊做相應(yīng)的判別處理。整體硬件設(shè)計架構(gòu)如圖2所示。

在共計352730次試驗(yàn)中我們發(fā)現(xiàn),實(shí)際系統(tǒng)虹膜圖像采集成功與否的幾個重要限制因子包括人機(jī)的交互配合、光強(qiáng)度等系統(tǒng)外界限制。因此系統(tǒng)的適用性設(shè)計十分重要。為達(dá)到全自動智能化虹膜采集,通過數(shù)萬次的實(shí)驗(yàn),我們總結(jié)出系統(tǒng)設(shè)計有如下幾方面的考慮:
2.1 距離感應(yīng)
首先,攝像頭模塊須外置用戶距離感應(yīng)傳感器用以監(jiān)測個體的存在。傳感器的選型可為接觸式(如讀卡器或密碼開關(guān)模塊等)和非接觸式模塊(如紅外感應(yīng)或雙肩探頭模塊等),考慮到系統(tǒng)今后的兼容性,與CPU的接口設(shè)計建議使用GPIO連接。
2.2 人機(jī)交互
攝像頭內(nèi)置應(yīng)用軟件可以使用多國語言指導(dǎo)用戶作相應(yīng)的上機(jī)操作。根據(jù)內(nèi)嵌的距離感應(yīng)傳感器模塊將用戶的距離反饋到中央處理器,然后以語音輸出的形式指導(dǎo)用戶調(diào)整頭部位置直至進(jìn)入合適的成像區(qū)域。或者使用視覺上的多色指示燈也可以滿足這個效果。
2.3 可調(diào)成像深度
攝像頭的成像深度是另外一個限制條件。為減少該限制因子的影響,提高系統(tǒng)的使用性能,攝像頭應(yīng)該有一定范圍的成像深度。在這個范圍內(nèi),光學(xué)鏡頭可以自動調(diào)節(jié)焦距實(shí)時成像。本試驗(yàn)系統(tǒng)的成像深度在22~36cm范圍內(nèi)均可正常成像。減小了系統(tǒng)對用戶操作的限制。
2.4 頭部傾斜檢測
攝像頭同時需要具有“頭部傾斜檢測”功能模塊,來檢測用戶的頭部是否傾斜超過一定范圍導(dǎo)致無法正常進(jìn)行后續(xù)的匹配判別。消除用戶因頭部位置不當(dāng)導(dǎo)致認(rèn)證失敗的限制,確保系統(tǒng)的穩(wěn)定性。






評論